

Outdoor garbage classification-oriented positioning control method for garbage sorting robot
A robot positioning and garbage sorting technology, which is applied to sorting, program control manipulators, manipulators, etc., can solve problems such as adverse effects on physical and mental health, and slow work progress
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Next, the technical solutions in the embodiments of the present invention will be apparent from the embodiment of the present invention, and it is clearly described, and it is understood that the described embodiments are merely embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, there are all other embodiments obtained without making creative labor without making creative labor premises.
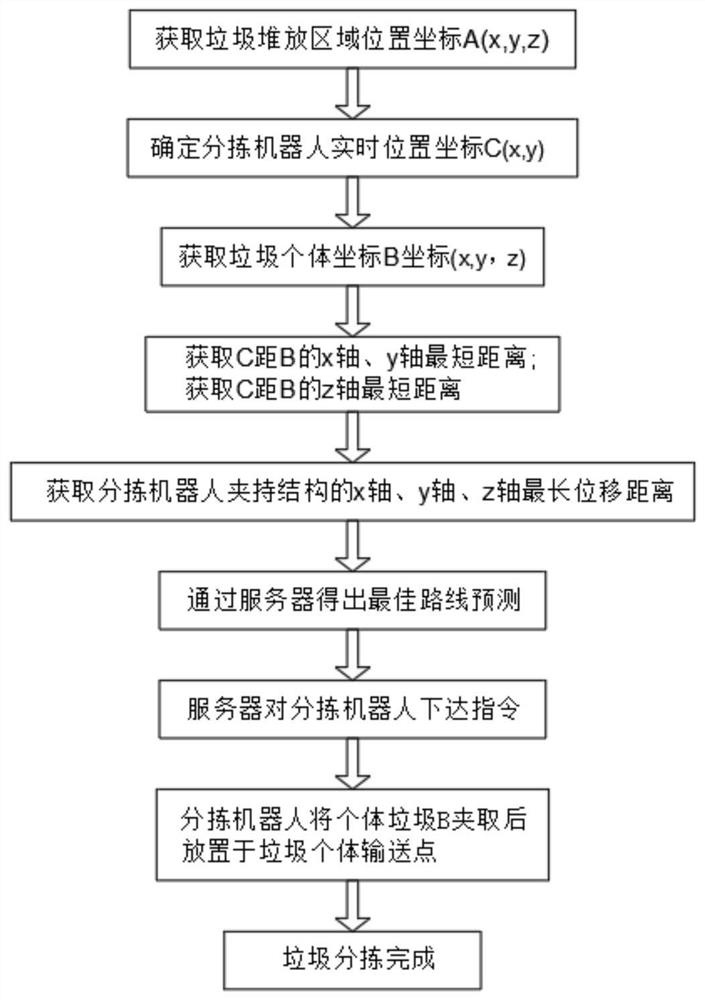
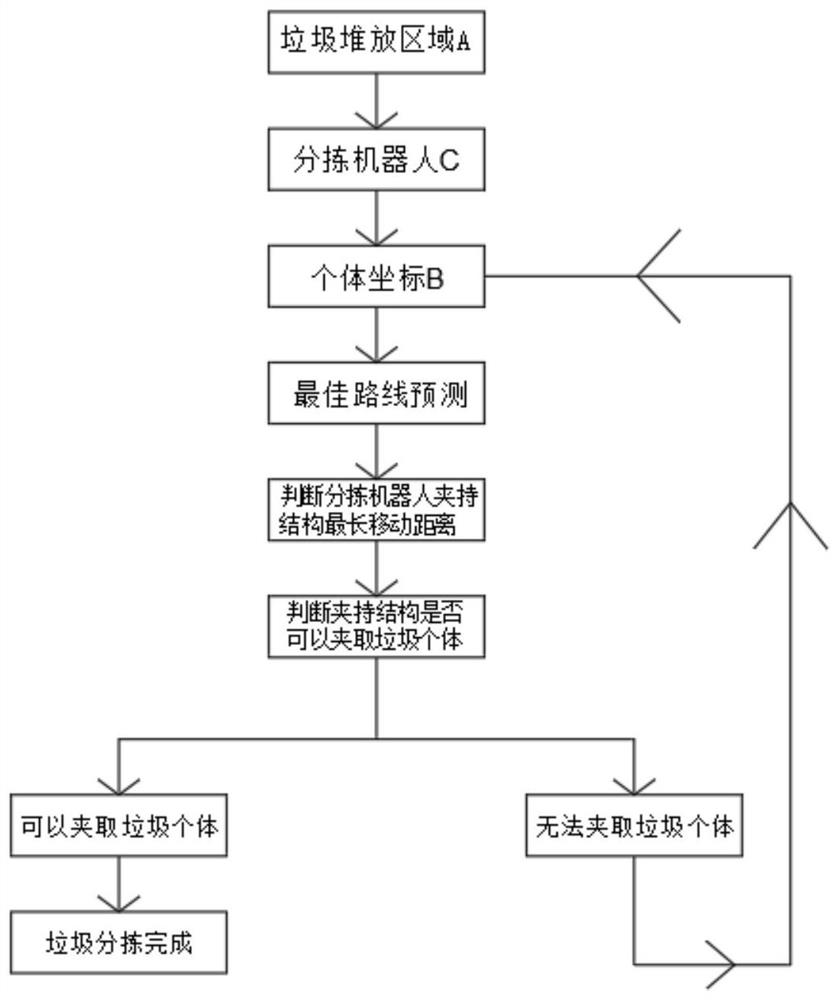
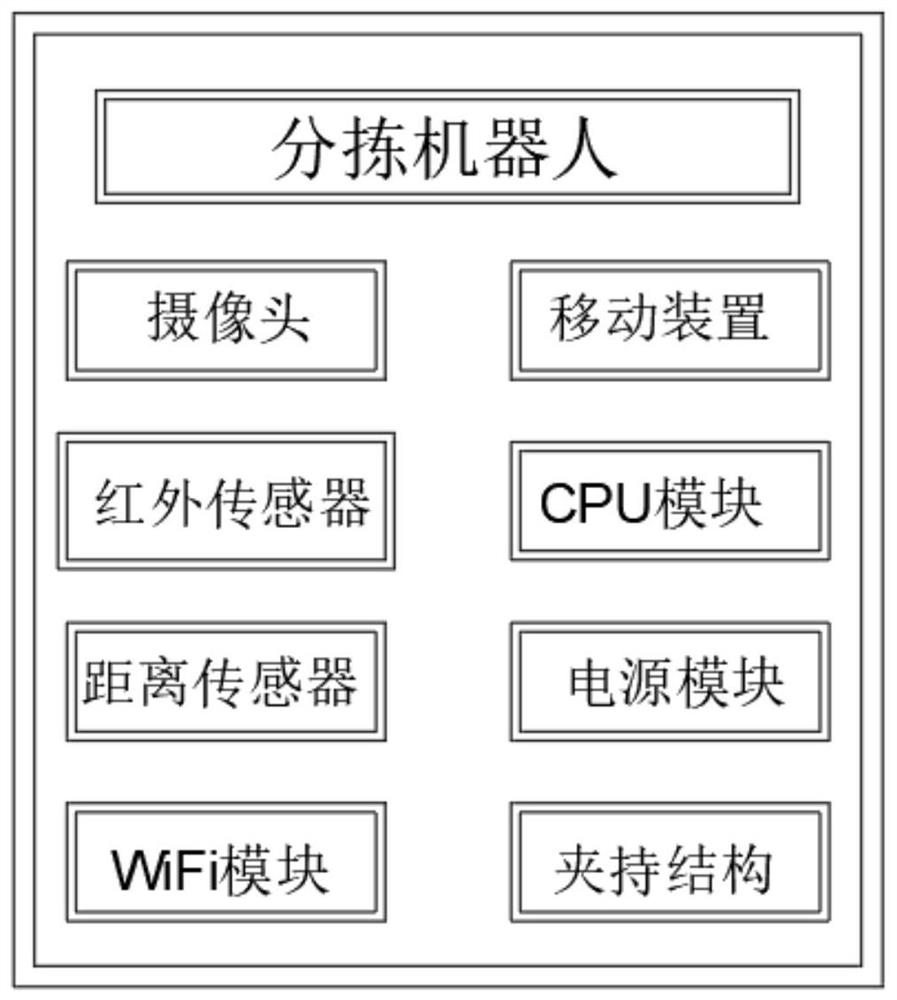
[0031] See Figure 1 to 3 The present invention provides a technical solution: a garbage sorter positioning control method for outdoor garbage classification, including,
[0032] Step 1: Get the place coordinate A, garbage stacking area position coordinate A, the garbage collection area position coordinate A is a collection of spam, and the trash replacement area and the hill structure are the set area of multiple garbage individuals, and the garbage collection area is specific to X-axis, Y-axis, Z-axis;
[0033] Step 2: S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More