

Automatic driving direction prediction method based on lightweight neural network
A neural network and automatic driving technology, applied in neural learning methods, biological neural network models, neural architectures, etc., can solve problems such as high hardware configuration requirements, slow computing speed, and vehicles driving out of the lane
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to enable those skilled in the art to better understand the technical solution of the present invention, the technical solution of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0051] system framework
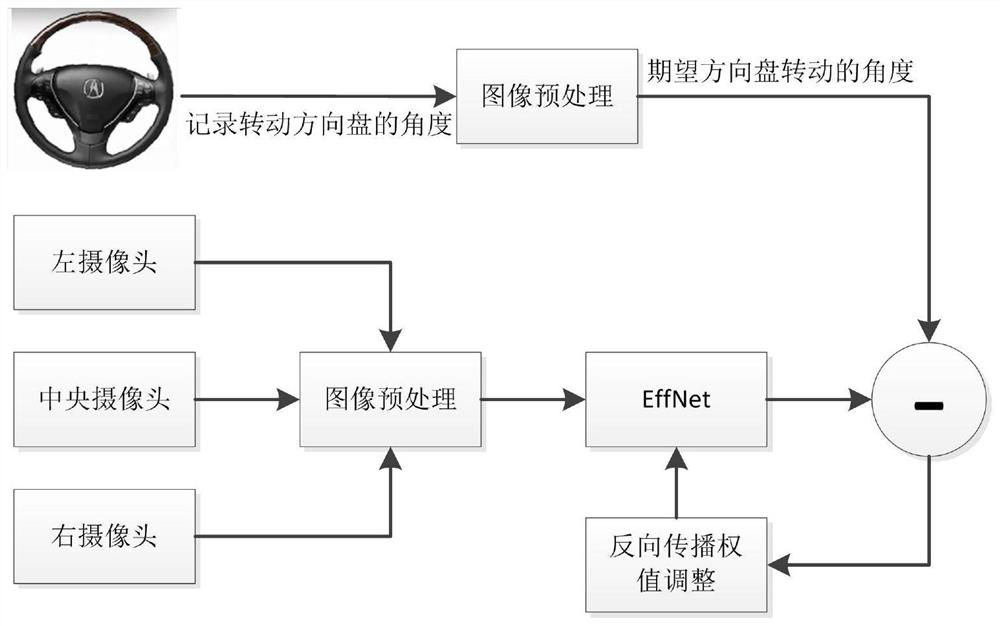
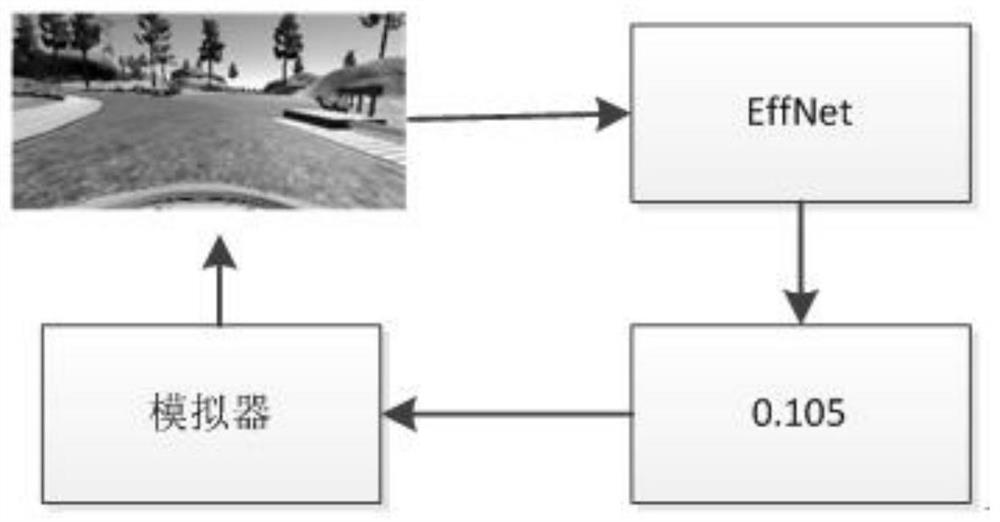
[0052]For the transmission road detection, image features are extracted manually, the position and angle of the road boundary are recorded, and then the angle and position of the steering wheel are judged according to the geometric method. The invention uses a lightweight convolutional neural network, so that the input is an image, and the output is an angle. The design is divided into two parts, the first part is for training the neural network, and the second part is for testing the network model. A kind of automatic driving direction prediction method based on lightweight neural network proposed by the present invention, such as figure 1 with 2 As shown, the specific steps are as follo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More