

Robot map-free navigation method based on deep safety reinforcement learning
A technology of reinforcement learning and navigation method, applied in two-dimensional position/channel control, instrument, vehicle position/route/altitude control and other directions, it can solve the problem that the strategy cannot guarantee safety, etc., and achieve a shortened navigation path, a better path, The effect of improving the success rate of navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to further describe the technical solution of the present invention in detail, this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific steps.
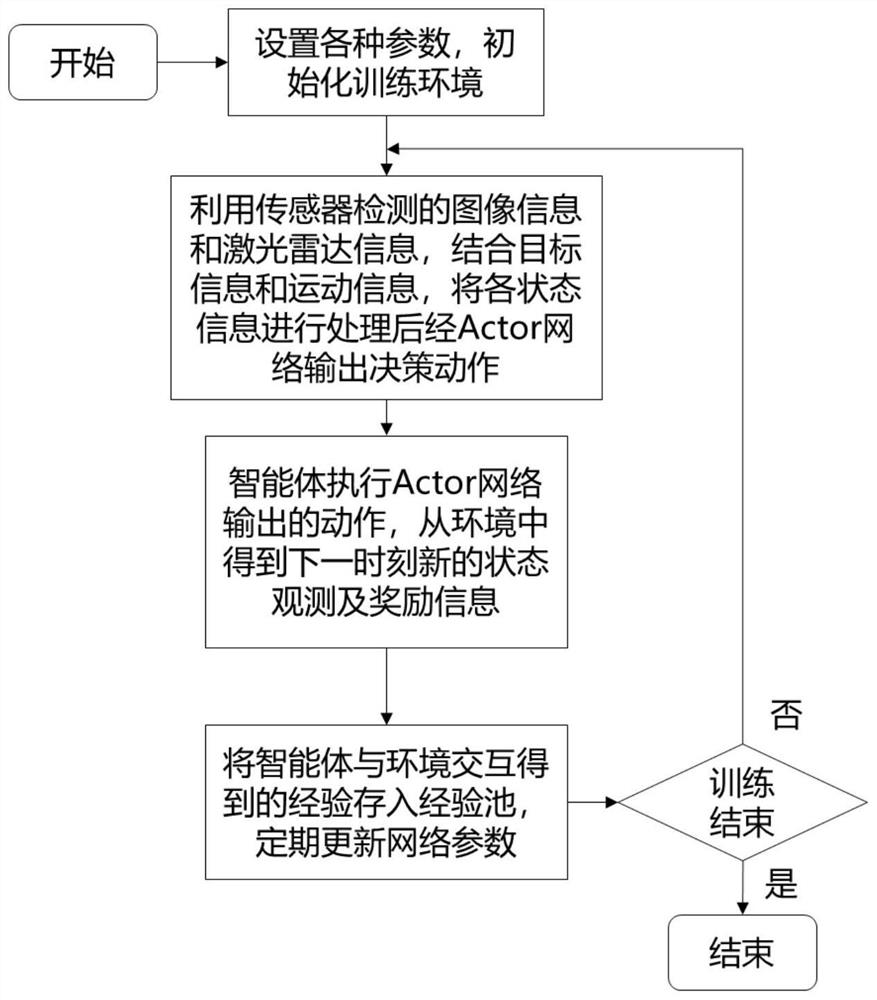
[0058] Such as figure 1 Shown is the overall flowchart of the method of the present invention, a method for robot map-free navigation based on deep security reinforcement learning, comprising the following steps:
[0059] S1: Initialize the training environment, set the parameters of the mobile robot, including the maximum linear velocity, minimum linear velocity, maximum angular velocity, minimum angular velocity, and maximum number of steps of the mobile robot, set the distance from the mobile robot to the target point, laser radar information and image information input According to the dimension of the training environment, the mobile robot reward function and safety risk cost function are designed;
[0060] In one e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More