

Visual tracking quadruped robot and feature information extraction algorithm of tracking line thereof
A technology of quadruped robots and walking robots, which is applied in the field of robots, can solve the problems that wheeled robots cannot play a role, and achieve the effect of improving trajectory tracking effect and recognition ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0026] The following is attached Figure 1-4 The present invention is described in further detail.
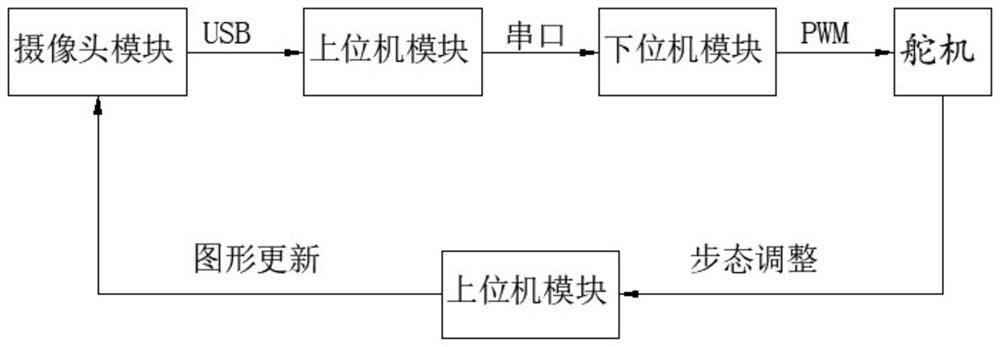
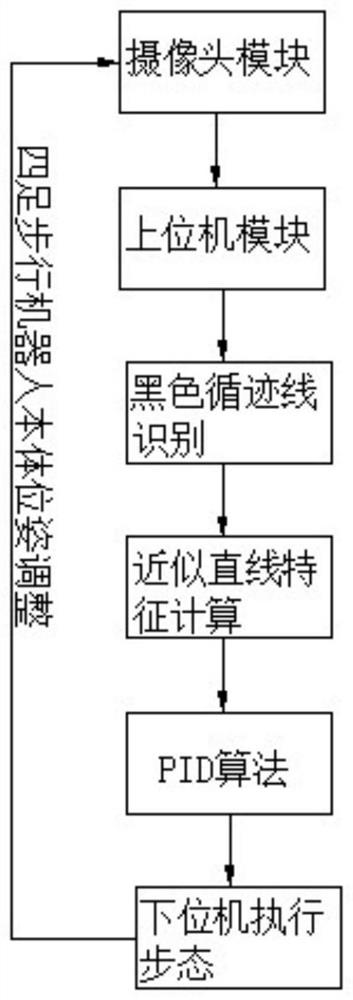
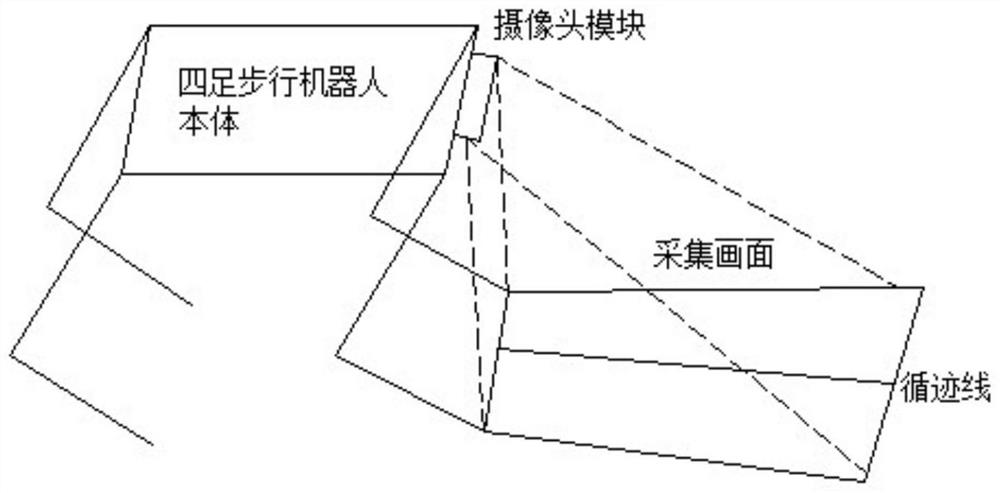
[0027] A vision-tracking quadruped robot, such as Figure 1-4 As shown, it includes a quadruped walking robot body with 8 degrees of freedom, a camera module, a host computer module, a lower computer module, and a steering gear. For the actuator of the leg joints of the quadruped walking robot body, the steering gear is a 60KG dual-axis digital steering gear of the RDS5160 model, which has the advantages of high control precision, good linearity, and fast response speed. The control mode controls the angle of joint movement by receiving the PWM signal sent by the main control chip and locks the angle; each leg has two degrees of freedom, namely the thigh rotation joint and the calf rotation joint, and a total of 8 servo drives are required. The camera module and the upper computer module are connected by usb, the camera module is a camera, and the camera is responsible for co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More