

Accurate control system and control device for manipulator
A technology of precise control and manipulators, applied in the field of manipulators, can solve problems such as the difficulty of judging the operating status of manipulators, and achieve the effects of improving turnover quality, improving cleanliness, and improving processing quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
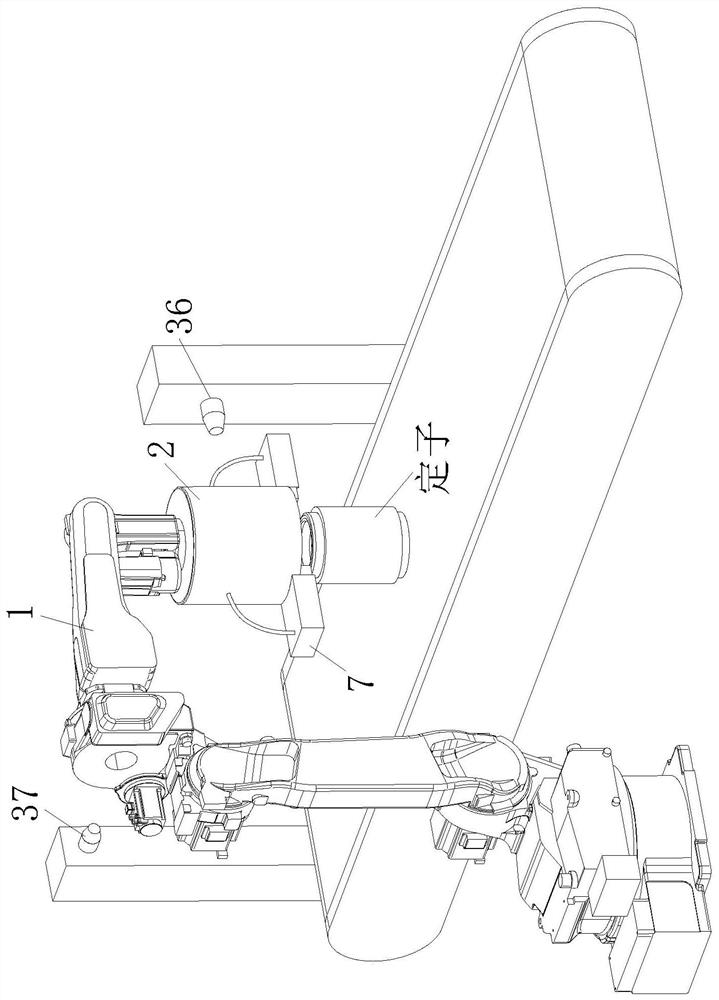
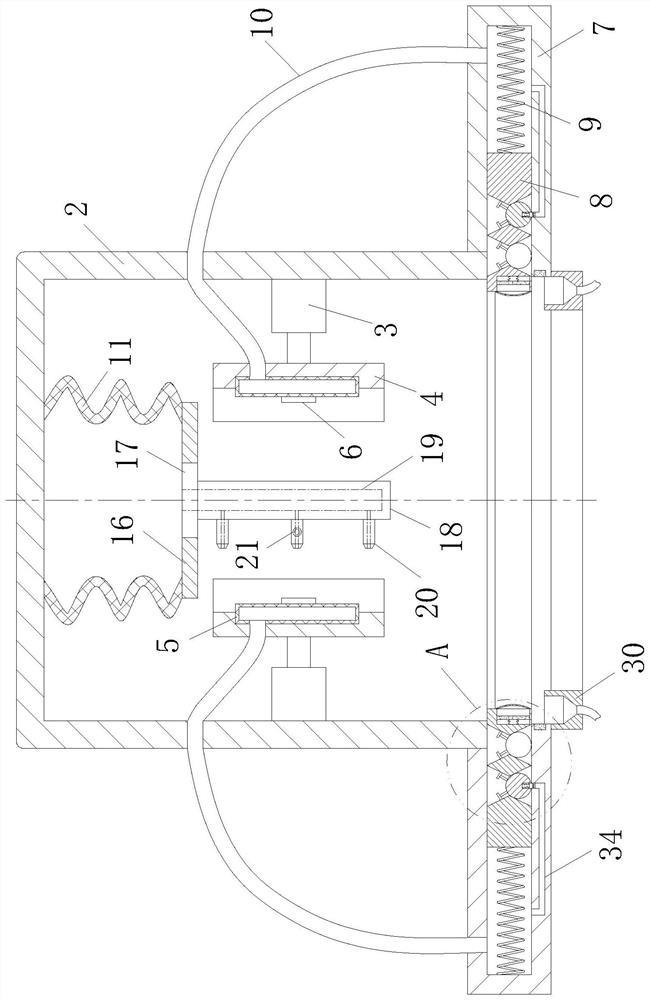
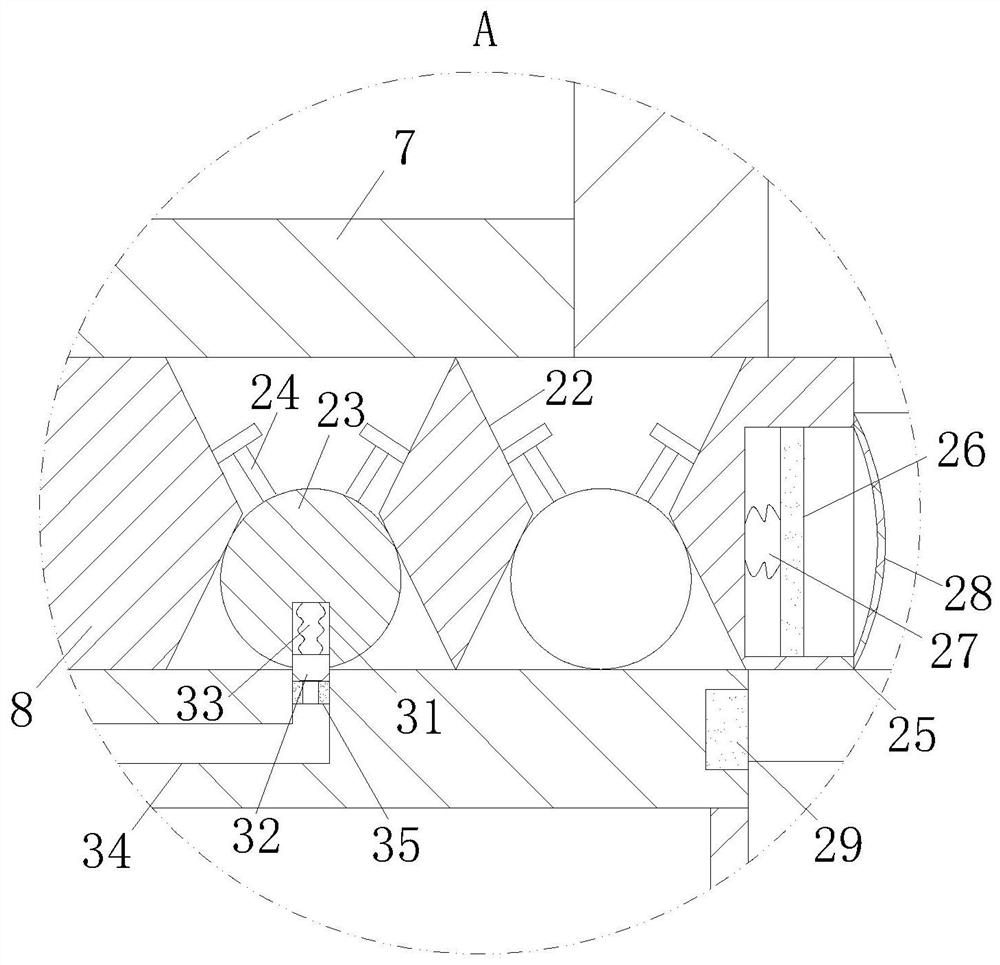
[0029] like Figure 1-Figure 3 As shown, a precise control device for a manipulator according to the present invention includes a manipulator 1; a grasping chamber 2 is provided at the end of the manipulator 1, and a push rod 3 is symmetrically installed inside the grasping chamber 2. The other end of the push rod 3 is connected with an arc-shaped splint 4, the side of the splint 4 close to each other is equipped with an airbag 5, and the symmetrical positions of the two airbags 5 are respectively provided with an inductor 6, and the grasping cavity 2 The bottom end of the sliding cavity 7 is symmetrically connected with a sliding cavity 7, and the inside of the sliding cavity 7 is slidably connected with a baffle plate 8, and a spring 9 is connected between the baffle plate 8 and the inner end of the sliding cavity 7, and the air bag 5 is connected to the corresponding sliding cavity. The inner ends of the cavity 7 are respectively connected through air pipes 10; when working...
Embodiment 2
[0038] like Figure 4 As shown in Comparative Example 1, another embodiment of the air injection assembly is as follows: the air injection assembly also includes a bottom plate 12 positioned at the bottom end of the telescopic bag 11, a connecting rod 13 is provided in the middle of the bottom plate 12, and the bottom plate 12 and The inside of the connecting rod 13 is respectively provided with an air channel 14, and the connecting rod 13 is connected with several sets of shunt tubes 15 communicating with the air channel 14 along its axial direction, and each group of shunt tubes 15 is circularly spaced along the axis of the connecting rod 13. When working, when the flexible bag 11 is compressed under the action of the stator, the gas inside it can be sprayed out from each branch pipe 15 through the air channel 14, so that the enameled coil on the stator can be fully and evenly blown , greatly improving the cleaning effect of the flexible bag 11 on the stator.
[0039] A pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More