

Multi-robot intelligent traffic control method and device
An intelligent traffic control, multi-robot technology, applied in the computer field, can solve problems such as robot deadlock, increase traffic efficiency, avoid deadlock phenomenon, and reduce human intervention.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0050] According to an embodiment of the present invention, a multi-robot intelligent traffic control device is provided. Figure 7 It is a schematic diagram of a multi-robot intelligent traffic control device according to an embodiment of the present invention, such as Figure 7 As shown, a multi-robot intelligent traffic control device according to an embodiment of the present invention includes:
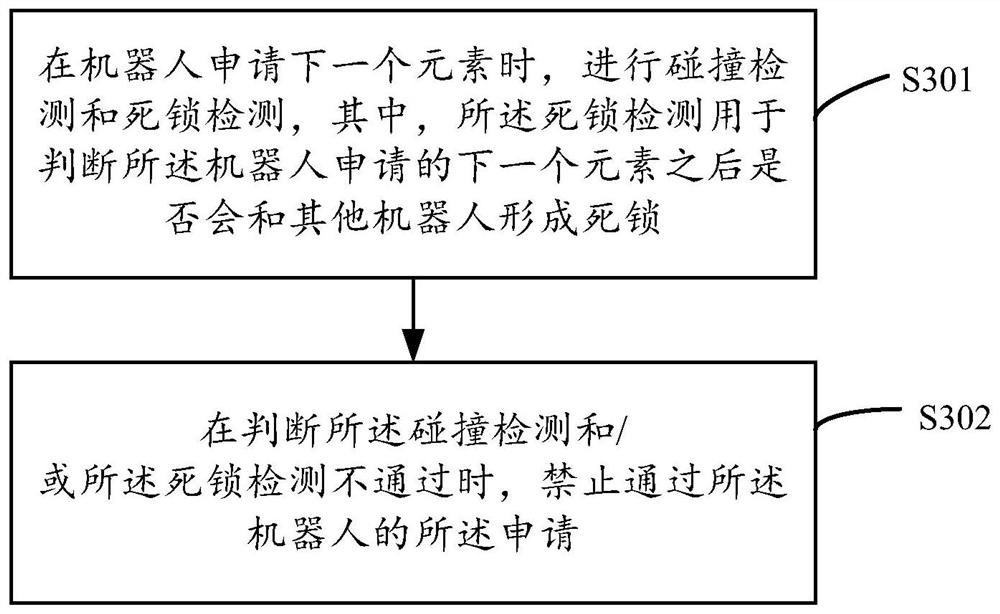
[0051] Detection module 70 is used to collide detection and deadlock detection when the robot is applied for the next element, wherein the deadlock detection is used to determine whether the next element of the robot will form a deadlock and other robots; Wherein, this element includes: the next action or next location of the robot application. The detection module 70 is specifically used:
[0052] Gets all other robots to perform all the positions in all action or position queues in the action queue;
[0053] It is judged whether there is a deadlock in which the next action or position...
Embodiment 2
[0064] Embodiments of the present invention provide a multi-robot intelligent traffic control device, such as Figure 8 As shown: memory 80, processor 82, and computer programs stored on said memory 80 and can operate on said processing 82, said computer program being implemented by said processor 82. The steps are described.
Embodiment 3
[0066] Embodiments of the present invention provide a computer readable storage medium that stores an implementation program for information transmission on the computer readable storage medium, which is implemented as described in the method embodiment when executed by processor 82.
[0067] The computer readable storage medium of this embodiment includes, but is not limited to: ROM, RAM, a disk, or an optical disk or the like.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More