

Image based simplified robot visual servo control method
A technology of robot vision and servo control, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of no attitude parameters, high flexibility requirements of the control process, etc., to reduce the amount of calculation, simplify the process, and avoid calibration work Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention is further illustrated in conjunction with the disclosure of the invention.
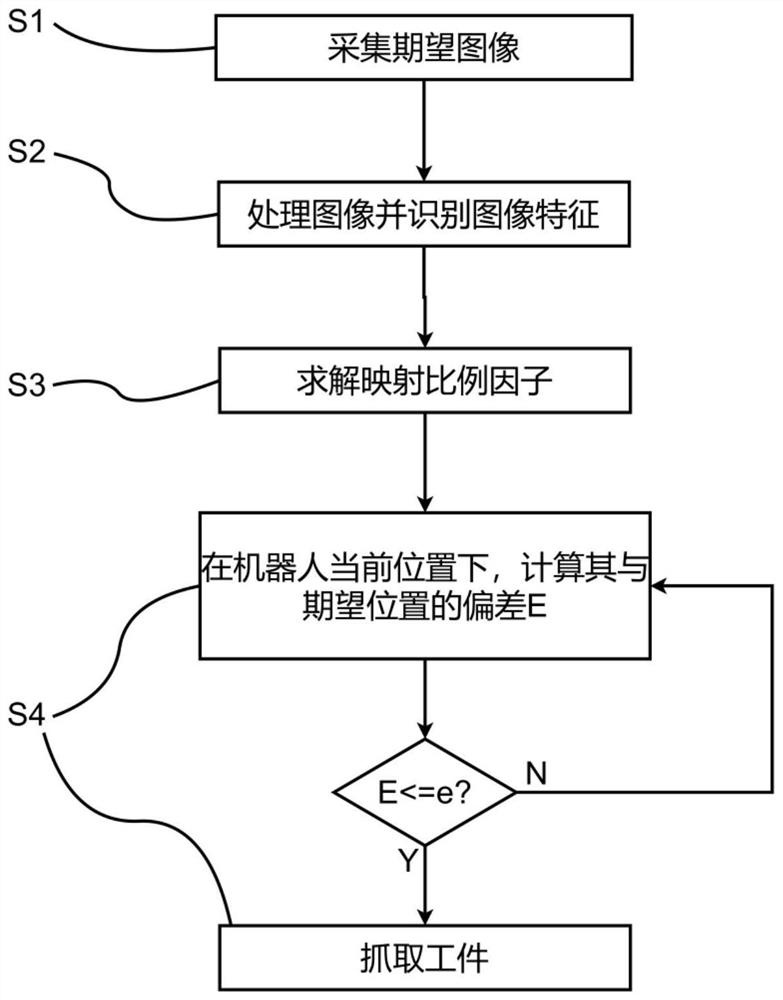
[0038] like figure 1 As shown, an image-based simplified robot visual servo control method includes the following steps:
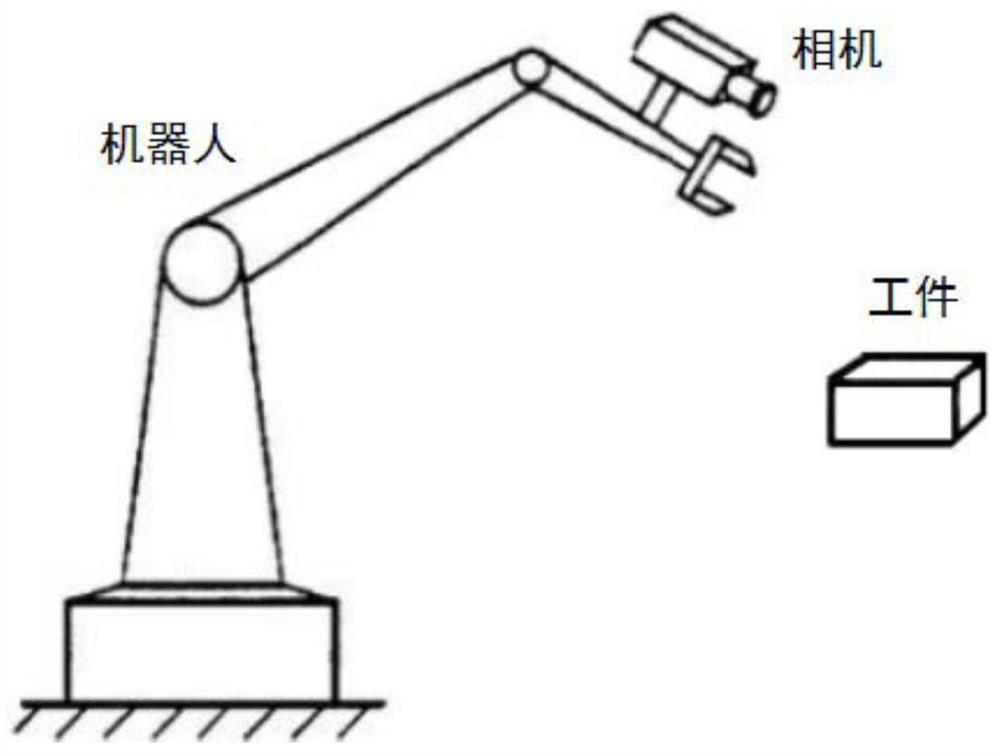
[0039] S1: Get the desired image: First, the robot is moved through the robot to move to the position where the workpiece can be grabbed, and then the workpiece image information under the current location of the robot is used. like figure 2 As shown, the camera is disposed next to the robotic claw, and the image collected by the camera is used to determine the position and attitude of the robot's hand claw;
[0040] S2: Image Processing: Upload the acquired desired image to the image processing module for image processing, and obtain the image features of the workpiece as the desired feature. The image processing provided by this embodiment includes the steps of:
[0041] S21: Contrastness of the workpiece image collected by the camera uses a linear tran...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More