

Active-disturbance-rejection fault-tolerant control method for unmanned helicopter
An unmanned helicopter, fault-tolerant control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., to achieve the effect of improving fault-tolerant ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0162] In order to make the purpose, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the embodiments. Obviously, the described embodiments are only some embodiments of the present invention, rather than all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
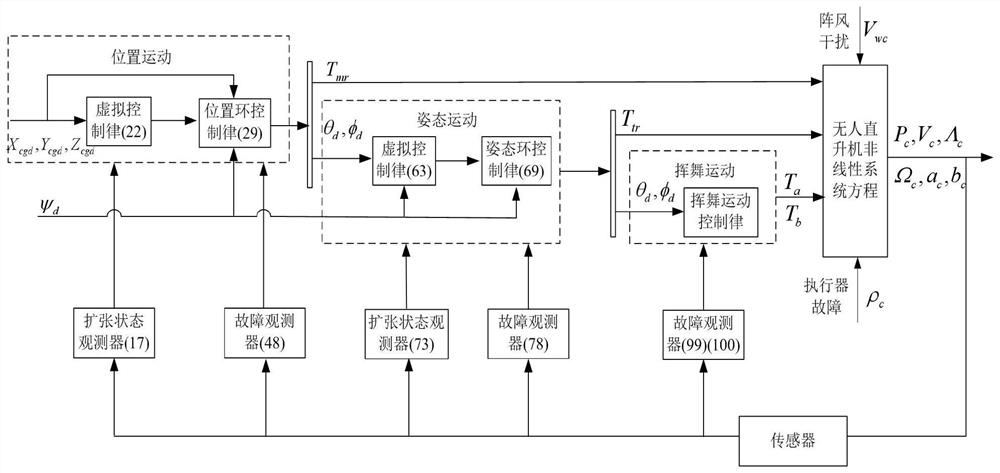
[0163] The invention relates to an unmanned helicopter ADR fault-tolerant control method. Firstly, the wind disturbance and actuator failure are respectively modeled; An adaptive fault observer is constructed to estimate the faults of the controller; finally, a robust fault-tolerant tracking controller is designed in combination with Lyapunov stability theory to ensure that the unmanned helicopter can track the desired signal while flying safely and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More