

Unmanned aerial vehicle flight path planning method in concave polygon area based on remote sensing task
A concave polygon, track planning technology, applied in three-dimensional position/channel control, instruments, control/regulation systems, etc., can solve the problem of simple algorithm, unsuitable for remote sensing tasks, and unsupported UAV track planning for multiple sorties, etc. problems, to achieve significant effects and meet the needs of remote sensing tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
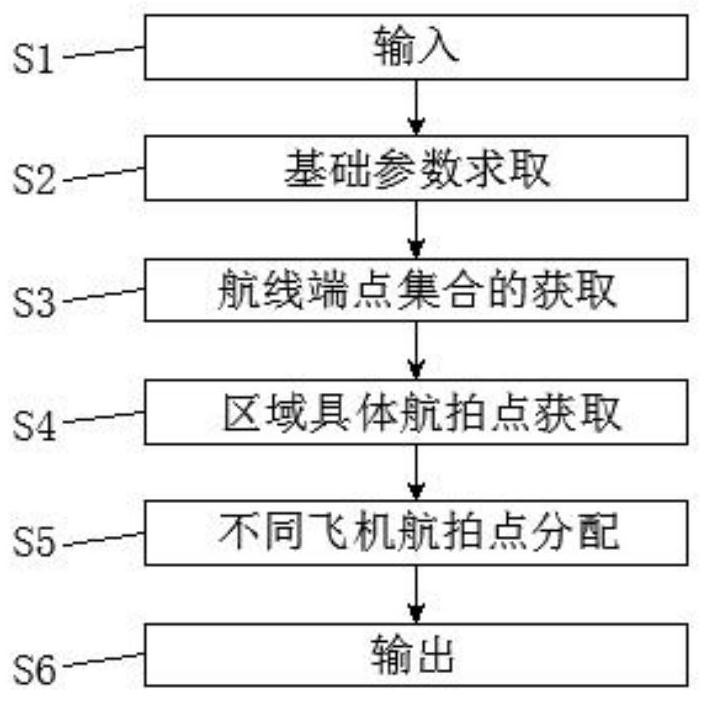
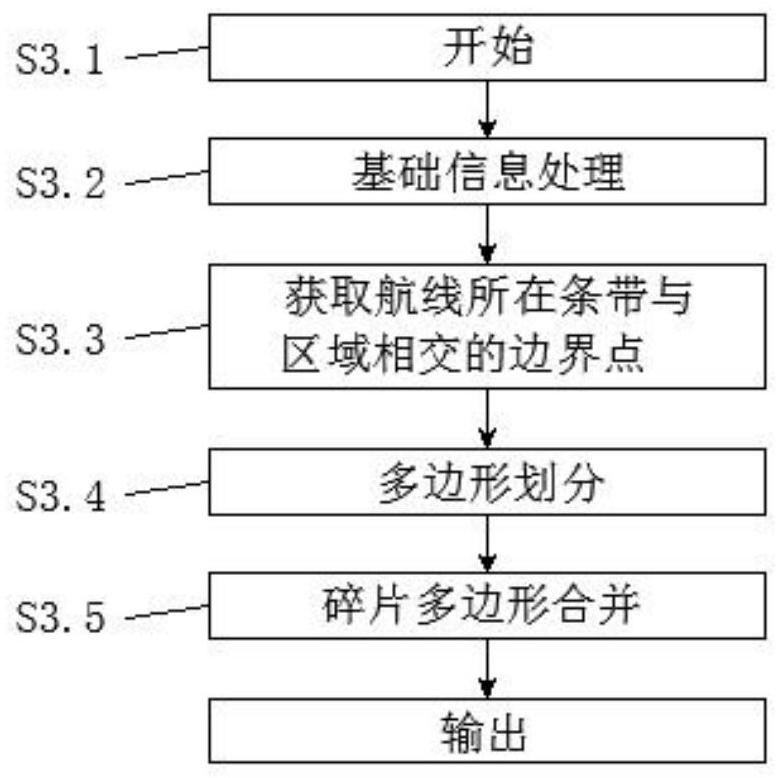
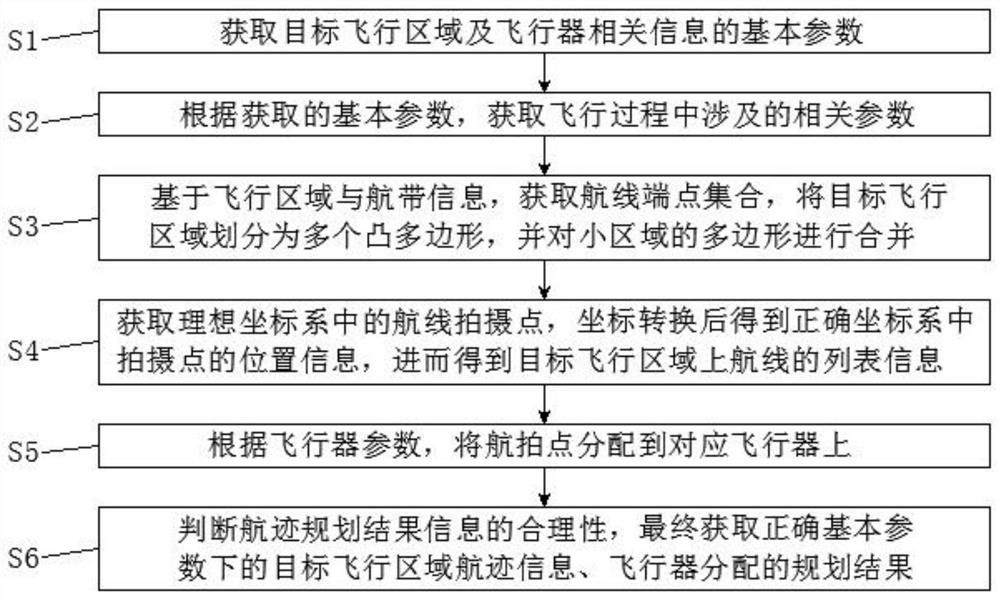
[0057] Please also refer to Figure 1 to Figure 6 Now, a specific implementation of UAV track planning based on remote sensing tasks in concave polygonal areas provided by the present invention will be described. The specific steps of this remote sensing mission-based UAV track planning in a concave polygon area include:
[0058] S1, obtain the basic parameters of the target flight area and aircraft related information, wherein the basic parameters include th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More