

A dense formation flight and collision avoidance control method for fixed-wing UAVs
A technology of formation flight and control method, which is applied in the field of dense formation flight and anti-collision control of fixed-wing unmanned aerial vehicles, can solve the problems of control, electromagnetic environment interference, etc., and achieve the effect of improving adaptability, robustness and simple implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
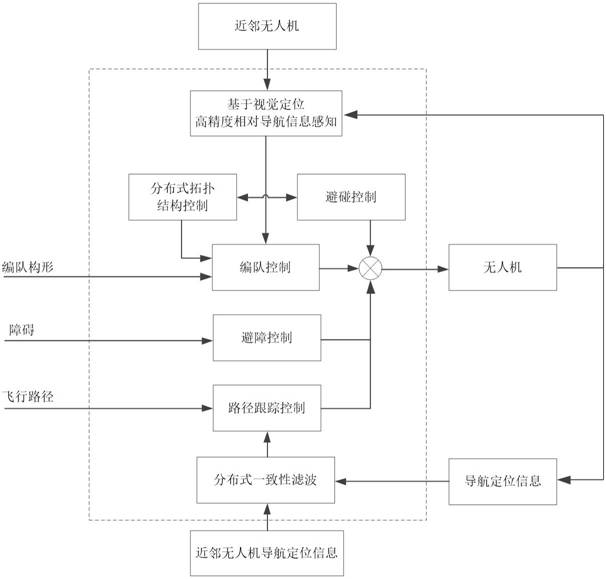
[0044] Such asfigure 1 As shown, this embodiment proposes a dense formation flight and collision avoidance control method for fixed-wing UAVs, including the following steps:
[0045] Step 1. Obtain the relative navigation and positioning information of each UAV in the UAV formation based on visual positioning, and use the obtained relative navigation and positioning information to construct the formation configuration maintenance control amount and inter-machine collision avoidance control amount.
[0046] Step 1 specifically includes the following sub-steps:
[0047] Step 11, mark the image of each UAV in the formation to obtain the marked image of each UAV; in this embodiment, the marked image of each UAV needs to ensure that it has obvious extraction features and is different from each other ;
[0048] Step 12, use the airborne vision sensor to acquire the marked image of the specified UAV, such as figure 2 As shown in , carry out digital image processing and feature poi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More