

Monocular camera object identification and positioning method based on vector illumination influence removing algorithm
A positioning method and de-illumination technology, applied in the field of image processing, can solve the problems of being easily interfered by external factors, expensive equipment, and the recognition success rate is very different, and achieve the effect of reducing the influence of light, fast recognition speed, and high recognition rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
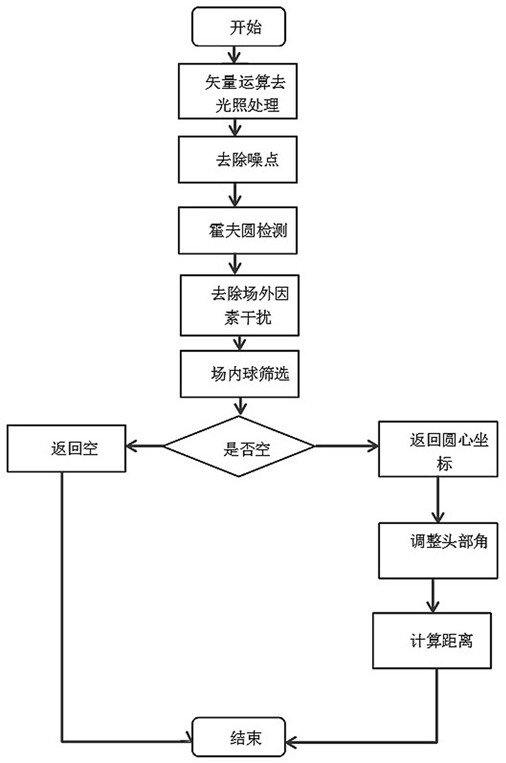
[0068] Example: such as figure 1 As shown, the method for identifying and locating monocular camera objects based on the vector de-illumination algorithm, specifically includes the following steps:
[0069] S1: Use a robot to collect image images, and perform de-illumination processing on the image images;
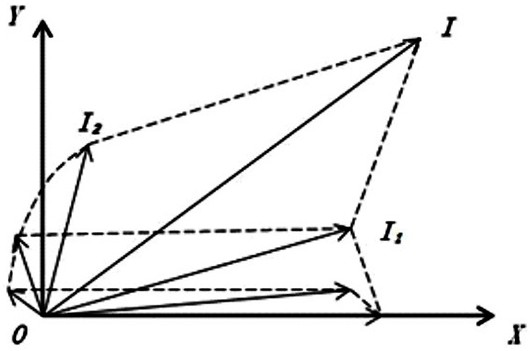
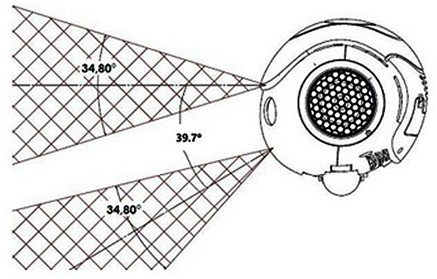
[0070] Such as figure 2 As shown, in the step S1, the robot collects image images through the acquisition device, that is, the camera installed on the head of the robot, and performs de-illumination processing on the obtained image images through a vector de-illumination algorithm. The specific steps are:
[0071] S11: First assume that the illumination in the shadow image is composed of balanced illumination and unbalanced illumination, and convert the image image into a vector I according to the coordinates, that is, the shadow image is expressed by the following formula:
[0072] (1);
[0073] in, represents balanced lighting, Represents unbalanced lighting; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More