

Non-contact acoustic monitoring and LoRa transmission system and method based on stereo garage
A three-dimensional garage, non-contact technology, applied in the field of safety inspection, can solve problems such as damage to garage equipment, accidents, vehicle damage, etc., to achieve the effect of convenient and flexible installation and reduction of on-duty personnel
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below. Apparently, the described embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other implementations obtained by persons of ordinary skill in the art without making creative efforts fall within the protection scope of the present invention. The current testing device of the present invention will be described in detail below with reference to the accompanying drawings.
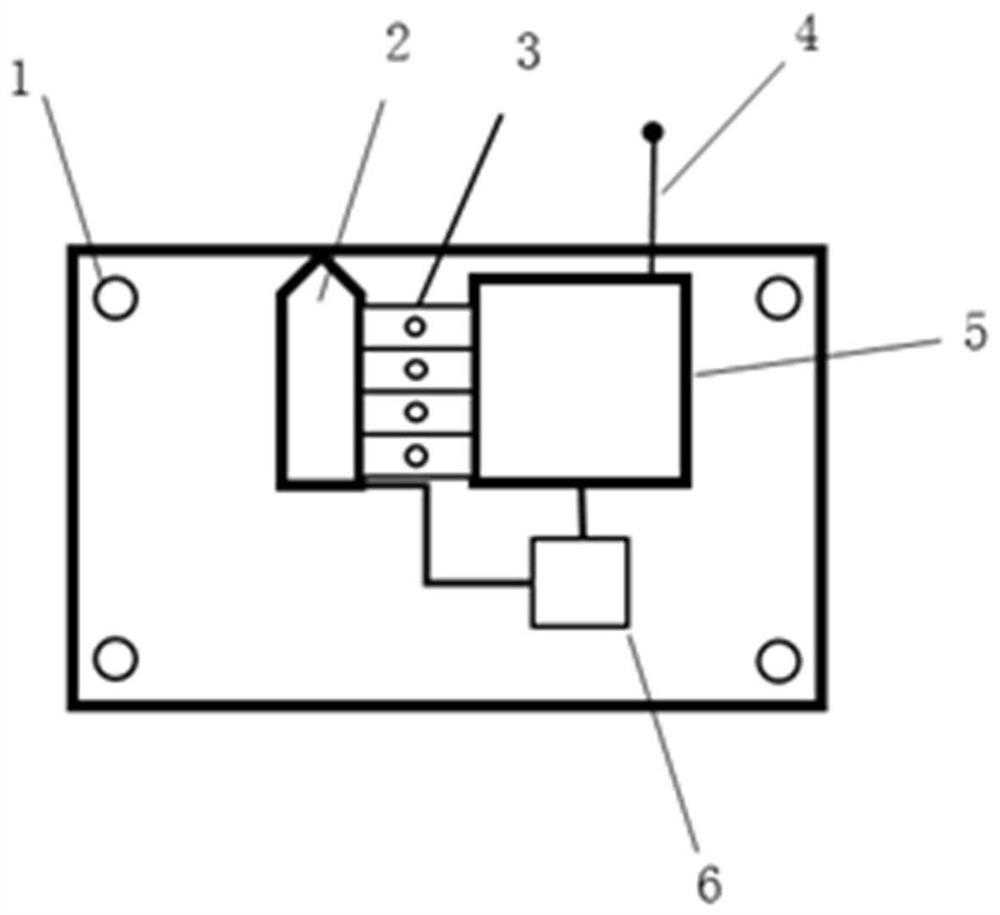
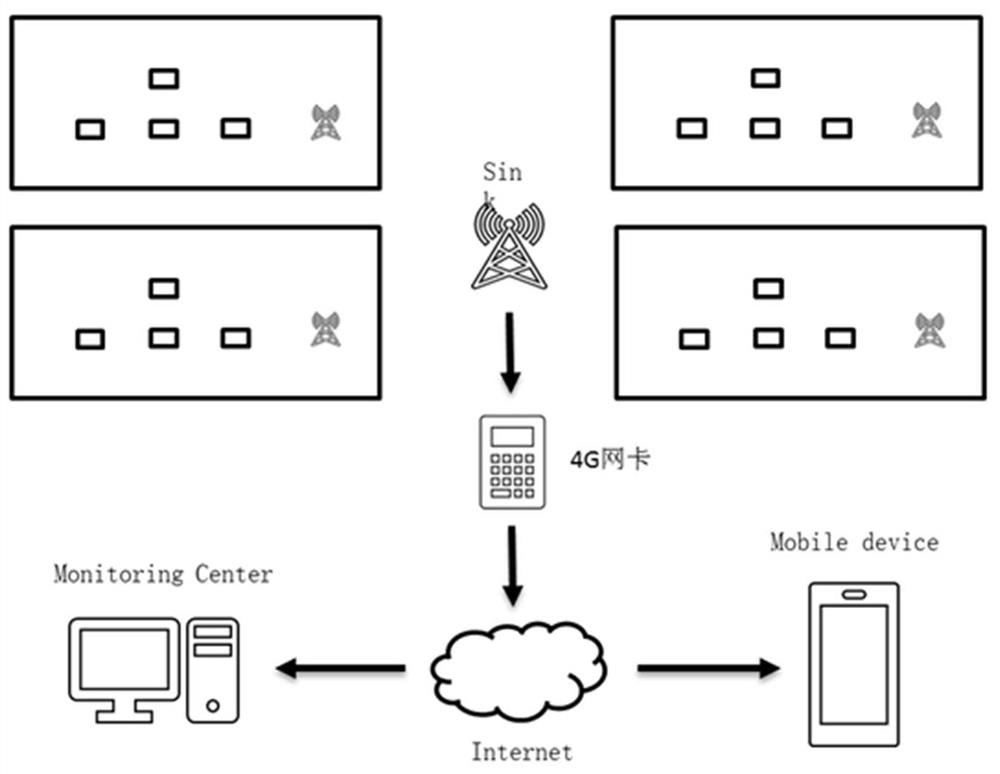
[0023] Such as Figure 1-5 As shown, four wireless sensor nodes are installed on each lifting platform of the intelligent three-dimensional garage, and the four wireless sensor nodes construct a planar quaternary array, such as figure 1 shown. The four wireless sensor nodes transmit the collected sounds to the host computer, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More