

Control method and device for autonomous vehicle
A technology of automatic driving and control device, applied in the direction of control device, steering control installed on the car, vehicle components, etc., can solve the problems of no human body protection, no collision point and object collection and forensics, real-time detection of driving speed, etc. To achieve the effect of protecting personal property
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
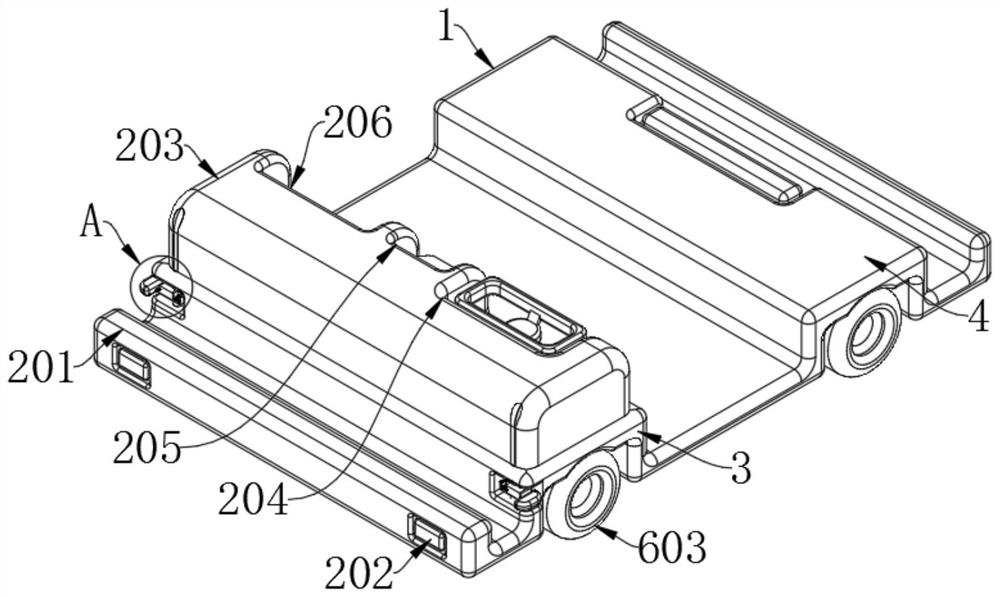
[0031] Embodiment 1: refer to Figure 1-6 As shown: a control device for an automatic driving vehicle, including: a bottom plate 1, and the top of the bottom plate 1 is fixedly installed with an impact processing mechanism 2, a constant speed detection mechanism 6 and a danger warning mechanism 7.
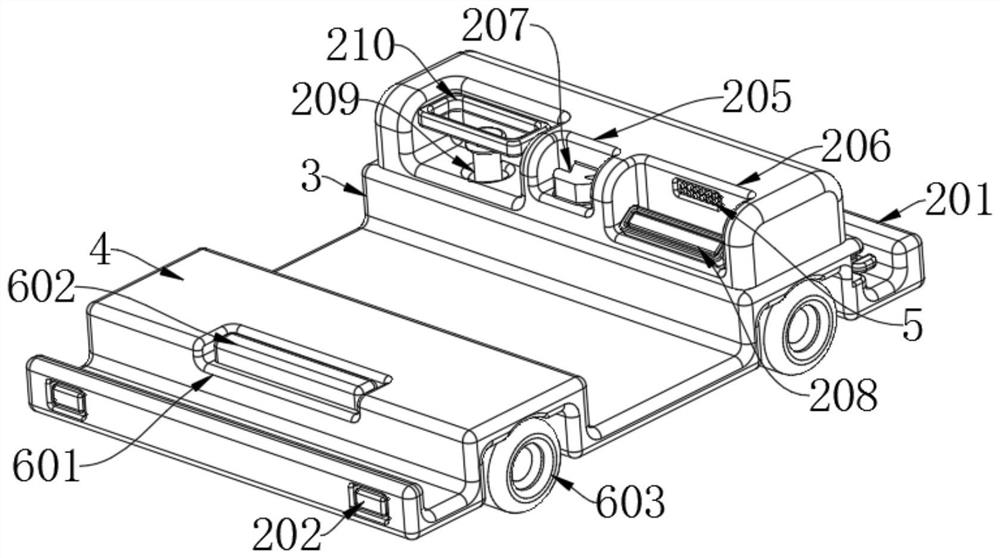
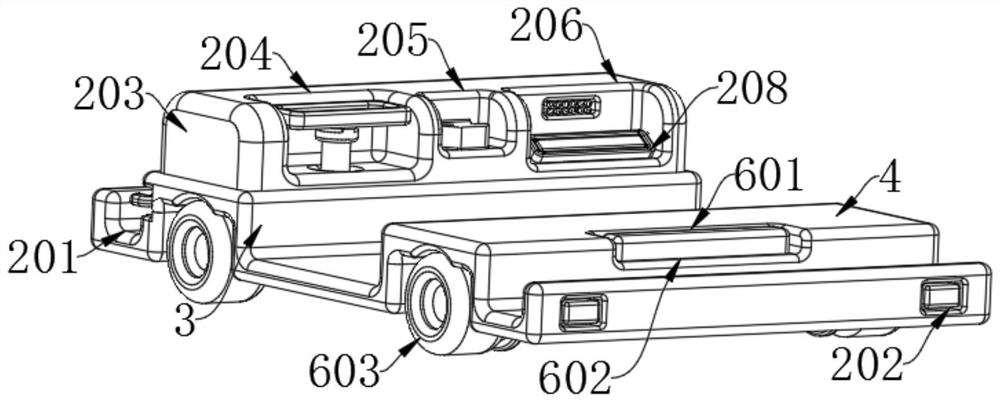
[0032] refer to Figure 1-4 As shown: the impact processing mechanism 2 includes two induction protection bars 201, and a set of grooves are provided on opposite sides of the two induction protection bars 201, and the number of each set of grooves is two, and the inside of the four grooves Both are fixedly installed with a macro camera 202, and the top of the base plate 1 is respectively fixedly installed with a support platform A3 and a support platform B4, and the top of the support platform A3 is fixedly installed with a console 203, and the top of the console 203 is respectively provided with an installation groove A204. Groove B205 and installation groove C206, the bottom of ...
Embodiment 2
[0042] Embodiment 2: The control method and device of a self-driving vehicle provided in this embodiment are roughly the same as in Embodiment 1, and its main difference from Embodiment 1 is that the macro camera 202 inside the groove in step 1 can be Shoot and record the impact process and objects, and store them in the console 203. During the impact process, most of the unmanned driving functions will be disconnected, and the vehicle body can be controlled in time through the manual steering wheel 210 in the installation slot A204. Step 2 The middle speed measuring connecting plate 605 can detect and monitor the speed of the vehicle in real time, so as to keep the safe driving speed of the vehicle.
[0043] Among them, the effect achieved by the use method of the control device of a self-driving vehicle: the safety of the locomotive during operation is stabilized through three aspects. The maximum impact force generated by the impact is transmitted to the console 203 for ana...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More