

Real-time three-dimensional reconstruction method for object grabbed by mechanical arm
A real-time 3D and robotic arm technology, applied in 3D modeling, image analysis, image enhancement, etc., can solve problems such as long running time of dense 3D reconstruction algorithms, difficulty in popularizing and applying 3D reconstruction technology, and inability to meet real-time 3D reconstruction. The effect of 3D reconstruction and segmentation is good, the segmentation effect is improved, and the accuracy of pose calculation is improved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
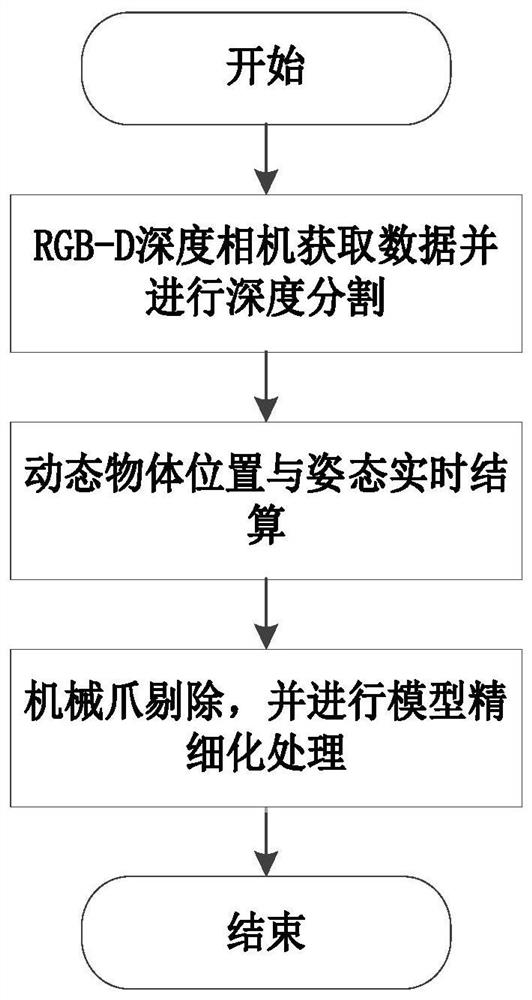
[0046] Such as figure 1 As shown, a real-time three-dimensional reconstruction method of a manipulator grabbing an object according to the present invention, the specific implementation steps are as follows:
[0047] Step 1. Use the RGB-D depth camera to obtain scene depth information and color images, and remove the background from the reconstructed scene through the real-time background segmentation technology based on depth information. The col...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More