

Bolster spring dismounting robot and bogie damping device dismounting system
A technology of robot and bogie, which is applied in the field of pillow spring dismantling robot and bogie vibration damping device disassembly system, can solve the problems of pillow spring support and limit, etc., achieve convenient disassembly process, reduce labor intensity, and improve disassembly efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
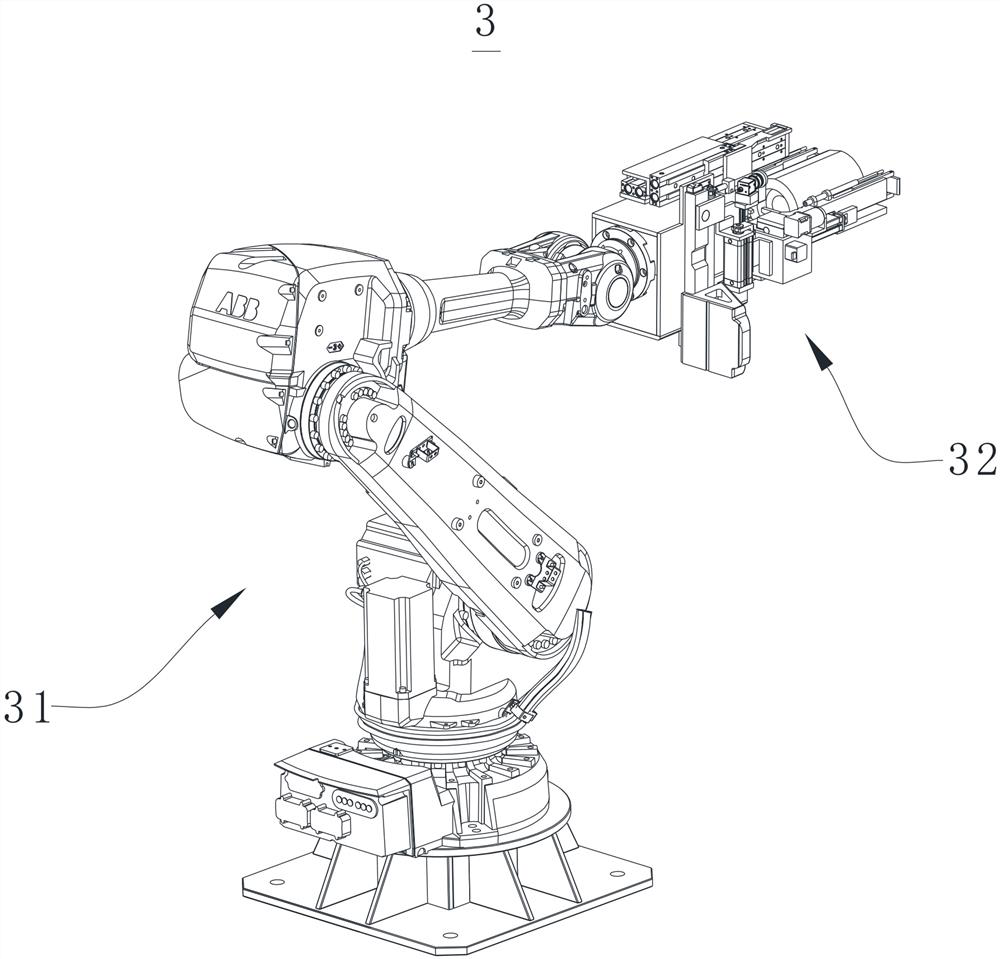
[0065] Please refer to image 3 , a pillow spring removal robot, comprising: a pillow spring removal robot arm 31 and a pillow spring removal robot arm 32 connected to the pillow spring removal robot arm 31. In this embodiment, the pillow spring removal robot arm 31 is a mechanical arm of a six-axis robot. arm.
[0066] Please refer to Figure 4 and Figure 5 The pillow spring dismounting manipulator 32 includes a frame 321, a hook assembly 322, a limit assembly 323 and a wedge dismounting assembly 325. One end of the frame 321 is connected with the pillow spring dismounting mechanical arm 31, and the other end of the frame 321 is connected with the limit assembly. The component 323 is connected, and the hook component 322 is arranged on the top of the pricing 321 . Hook down component 322 is used for hooking down pillow spring 94, and the pillow spring 94 after hooking down is transferred in the limit assembly 323, and the pillow spring 94 is limited and clamped by the lim...
Embodiment 2
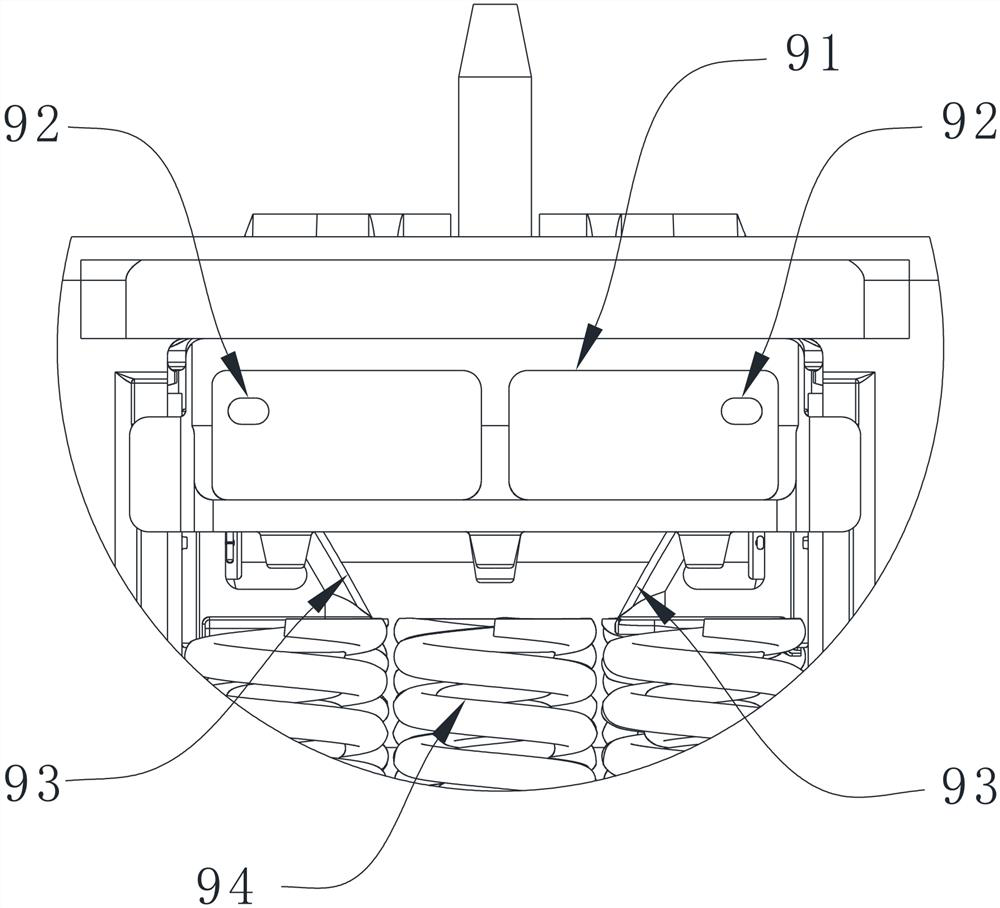
[0076] Please refer to Figure 9 , a rail vehicle bogie wedge support robot, comprising: a bracket 21, a three-degree-of-freedom movement module 22 and a wedge support module 23. The three-degree-of-freedom mobile module 22 is fixedly installed on the top of the bracket 21 , and the wedge support module 23 is suspended on the three-degree-of-freedom mobile module 22 . The three-degree-of-freedom moving module 22 drives the wedge support module 23 to move to correspond to the bolster 91, and the wedge support module 23 supports the wedge 93 inside the bolster 91, thereby separating the wedge 93 from the pillow spring 94 , to facilitate subsequent disassembly of the pillow spring 94.
[0077] The support 21 includes a vertical bar 211 and a cross bar 212. One end of the cross bar 212 is connected to the top of the vertical bar 211, and the other end of the cross bar 212 is connected to the three-degree-of-freedom mobile module 22, that is, the cross bar 212 is connected to the ...
Embodiment 3
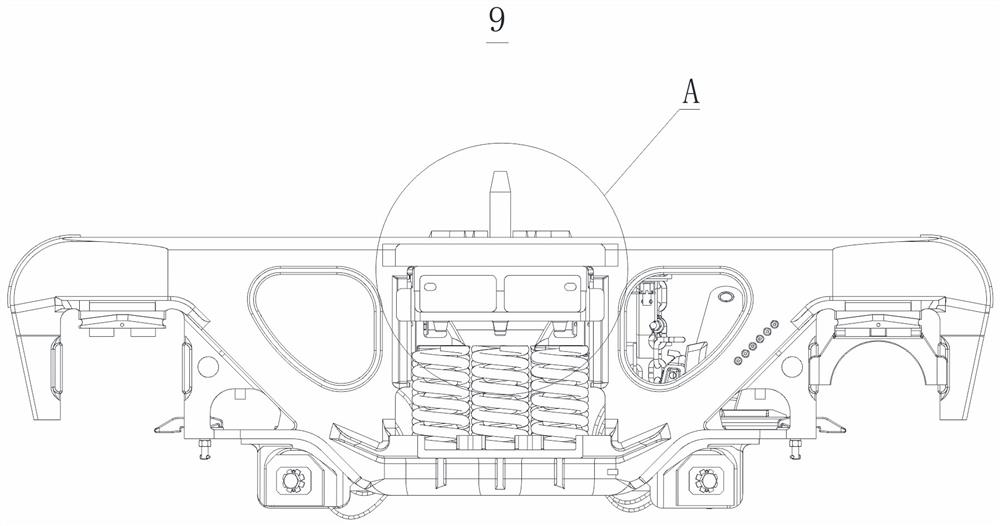
[0084] Please refer to Figure 14 , a bogie vibration damping device removal system, comprising:
[0085] Two bogie support devices 1 arranged at intervals are used to support and lift the bogie 9;
[0086] The above-mentioned wedge support robot 2 is used to support the wedge 93 and release the limit on the top of the pillow spring 94;
[0087] The above-mentioned pillow spring removal robot 3 is used for dismounting the wedge 93 and the pillow spring 94;
[0088] The pillow spring wedge transfer robot 4 is used to transfer the wedge 93 and the pillow spring 94 to the transfer tray 51 of the conveying line 5 .
[0089] Wherein, the wedge support robot 2, the pillow spring dismounting robot 3, and the pillow spring wedge transfer robot 4 are arranged close to the bogie support device 1, and at the same time, the conveying line 5 is also arranged close to the bogie support device 1, and the bogie support device 1 1. The cam support robot 2 and the pillow spring removal robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More