

Real-time identification system and method for crops based on unmanned aerial vehicle
A technology of identification system and identification method, applied in the field of real-time identification system of crops based on UAV, can solve the problems of low identification accuracy of crop types, different heights of trees, uneven distribution of field sizes, etc., to improve efficiency and informatization The level of technology, the effect of improving work efficiency and accuracy, and promoting sustainable agricultural development
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
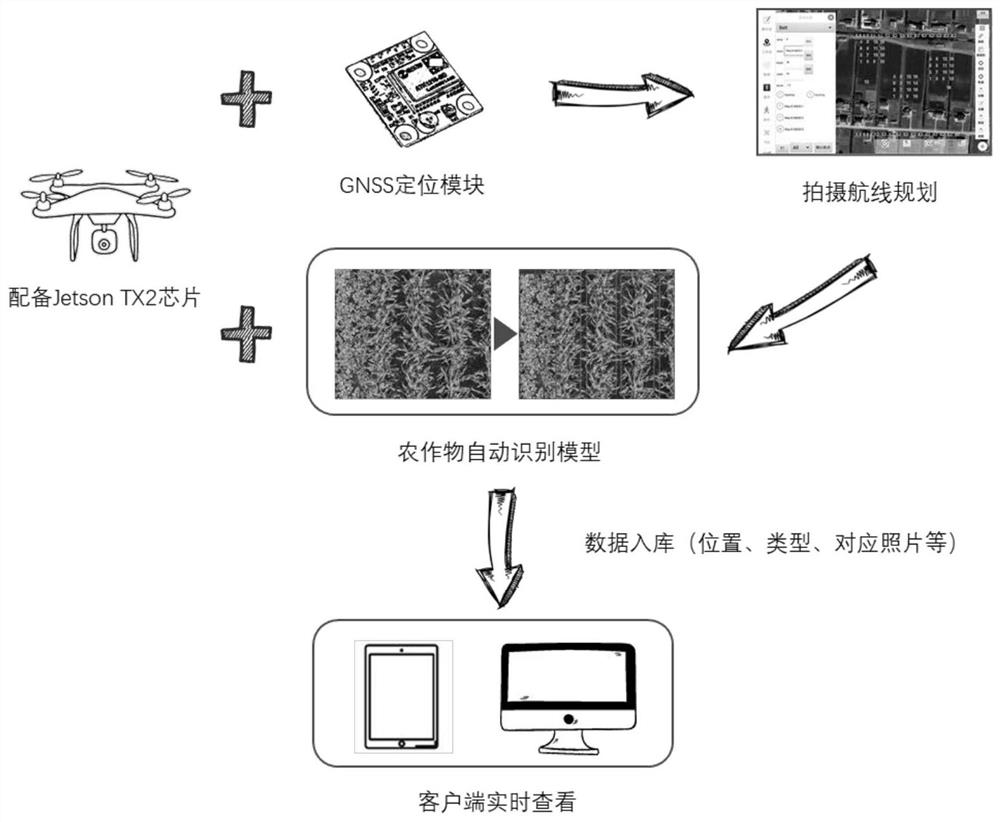
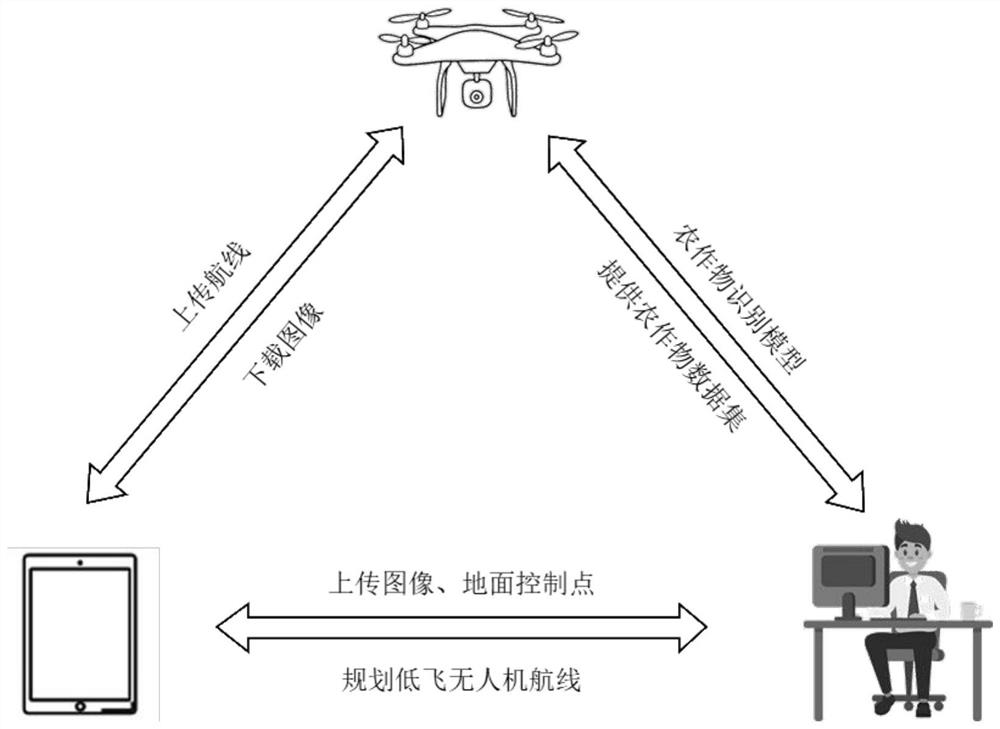
[0042] See figure 1 with figure 2 This embodiment provides an engine-based crop real-time recognition system, including: drone platform, route planning module, crop recognition module, server and mobile terminal, an image acquisition device and crop recognition on a drone platform Module, the route planning module is set in the server, the drone platform, the route planning module, the crop recognition module, the server, and the mobile terminal can communicate with each other.
[0043] The image acquisition device is for continuous image acquisition to the survey area, acquires the first image and the second image of the area to be investigated, and transmits the first image and the second image to the server, crop recognition module, and mobile terminal, wherein When an image is in an air of the drone platform, the image acquisition device is acquired by the image acquisition device, the second image is an image acquisition device when the drone platform is at 15M to 20m from th...
Embodiment 2
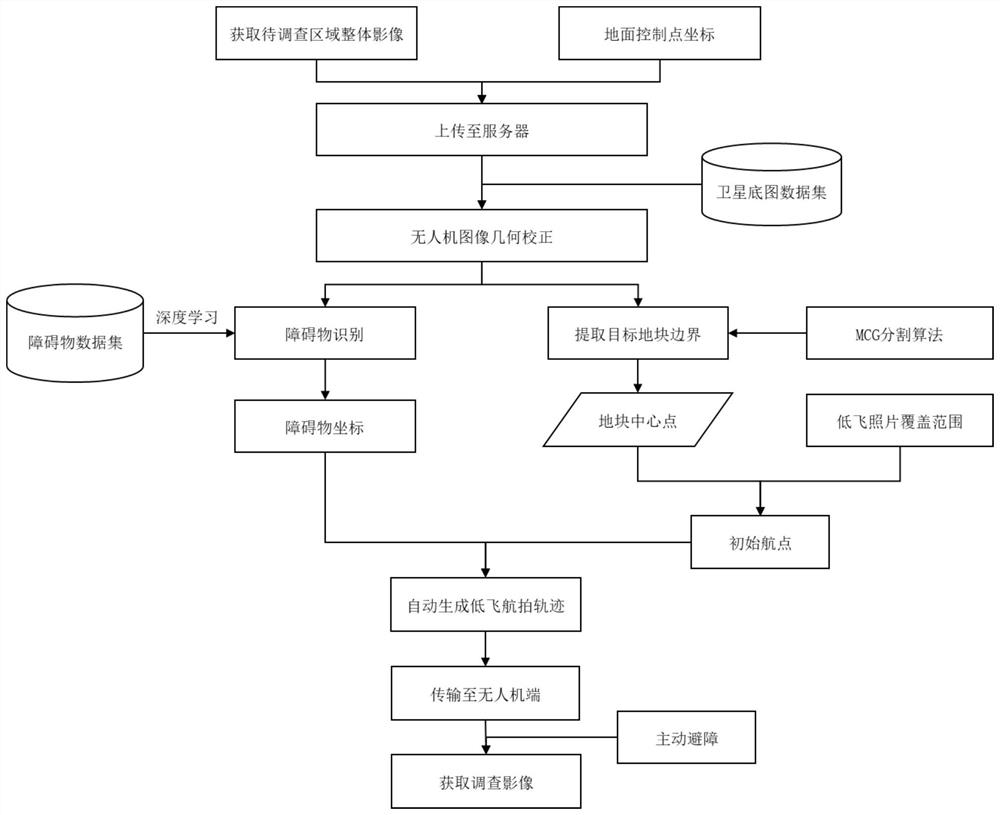
[0060] See Figure 3 - Figure 5 This embodiment provides a real-time recognition method based on an officer-based crop, including the steps of:
[0061] Step S1, according to the survey range and the actual situation, the drone platform is flying to 100m to 500m, and the image acquisition device to be investigated is obtained by the image acquisition device on the drone platform, and the area of the survey is obtained through the GNSS handset. Ground control point coordinate information, and the first image and the corresponding ground control point coordinate information are uploaded to the server;
[0062] Step S2, the industry personnel download the first image and the corresponding ground control point coordinate information, and performs geometric correction processing, which has the corresponding set coordinate information to obtain a geometric correction image;
[0063] Step S3, the image input after the registration obtained in step S2 is used to identify the YOLOV3 obsta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More