

A UAV path planning method to minimize the number of UAVs
A path planning, UAV technology, applied in the field of communication, can solve the problem of not considering the distance between sensor nodes and the starting position of the UAV, and achieve the effects of expanding diversity, reducing costs, and reducing total energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in further detail below with reference to the accompanying drawings and specific embodiments.
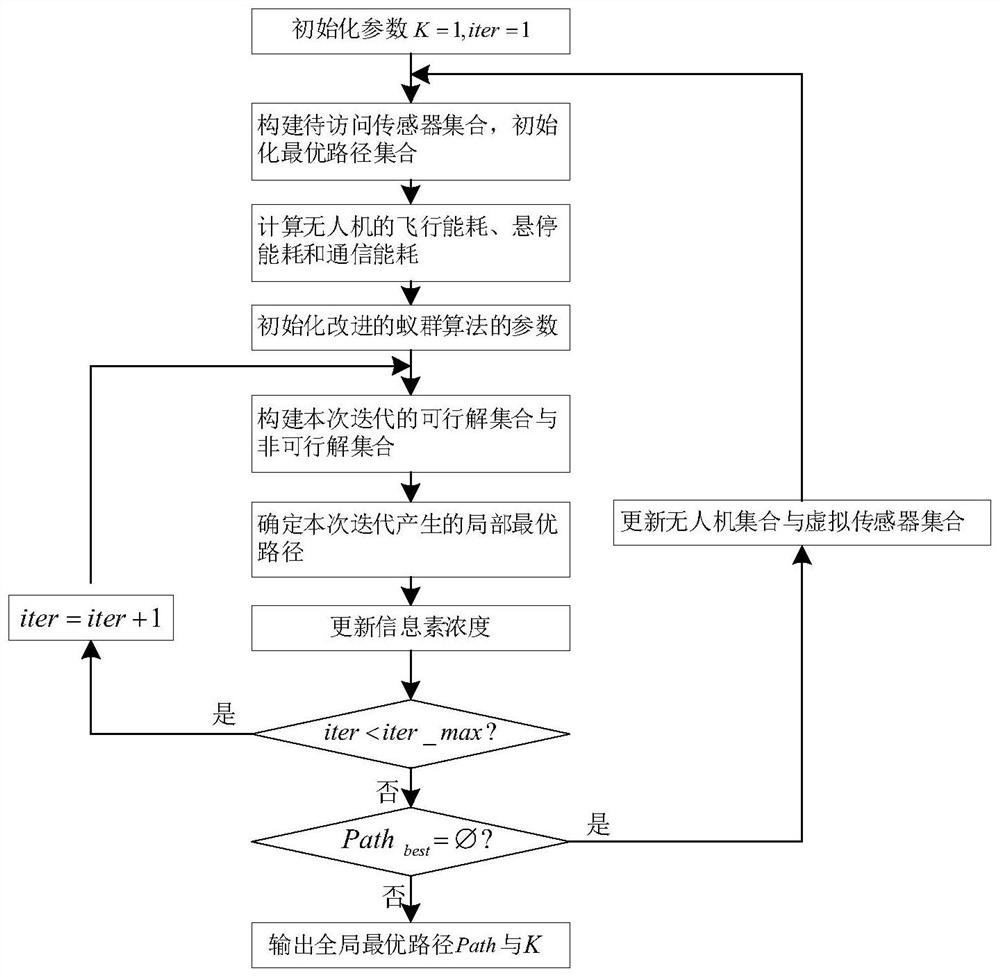
[0050] refer to figure 1 , the present invention comprises the steps:
[0051] Step 1, initialization parameters:
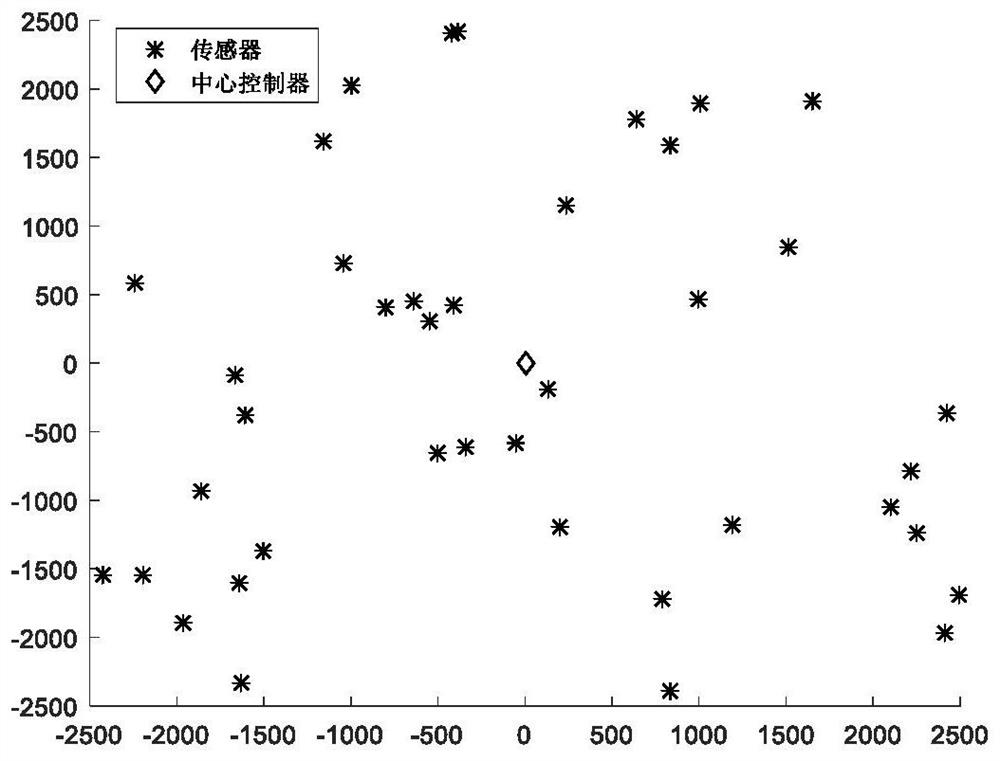
[0052] (1a) Initialize the distribution on the ground where the coordinate position (0,0) of the central controller is O and there are K UAVs U={U 1 , U 2 ,…,U k ,…,U K }; Initialize I sensors distributed on the ground as A={A 1 ,A 2 ...A i ,...A I }, I≥2, the ith sensor A i The location coordinates of (x i ,y i ); the maximum energy of all drones is E th , the flight speed is v, and the flight energy consumption, hovering energy consumption and communication energy consumption per unit time are all e f , e h and e t , at the ith sensor A i The time of hovering and communication are both K≥1, in order to avoid wasting UAV resources, the number of UAVs in the network should not exceed the number of sensors...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More