

Optimal time trajectory planning method for mechanical arm
A technology of trajectory planning and optimal time, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as easy to fall into local oscillations, achieve the effect of accelerating convergence speed and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
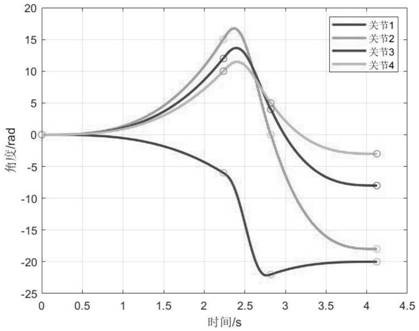
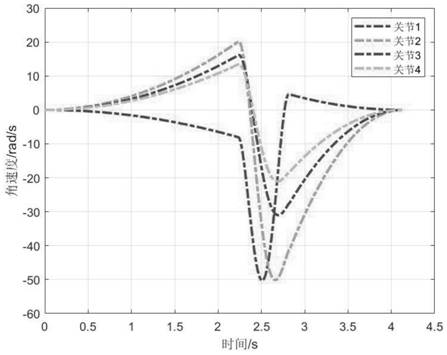
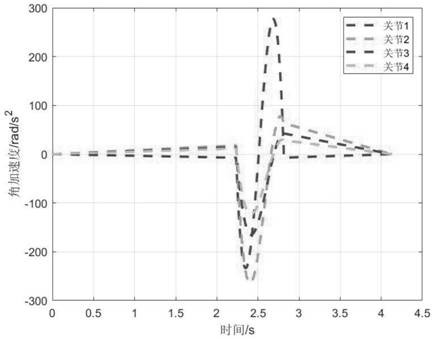
[0051] Figure 1a is the initial trajectory parameter map of the four-axis manipulator; Figure 1b kinematics constraint graph for the four-axis manipulator
[0052] Such as figure 2 As shown, the present invention provides a method for optimal time trajectory planning of a manipulator, including:
[0053] S1: Obtain the trajectory planning parameters, the trajectory planning parameters include: the starting point θ of the joint i0 , waypoint θ i1 and θ i2 , end point θ i3 , the number of robot joints is the number of degrees of freedom, the velocity and acceleration of the initial point and the end point;
[0054] S2: Based on the trajectory planning parameters, establish a trajectory planning interpolation function of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More