

End-to-end indoor mobile robot autonomous navigation method in non-structural environment
A mobile robot and autonomous navigation technology, applied in navigation, surveying and mapping and navigation, navigation computing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] In order to enable practitioners in the technical field to better intuitively understand the present invention, the present invention will be further described below in conjunction with the implementation of specific cases, but in practical applications, the present invention is not limited to specific cases.
[0083] An autonomous navigation method for medical service robots based on deep learning in a dynamic environment of the present invention needs to be used in large indoor places such as hospital buildings, and its function is to navigate mobile robots safely, accurately and quickly in this dynamic environment reach the target point.
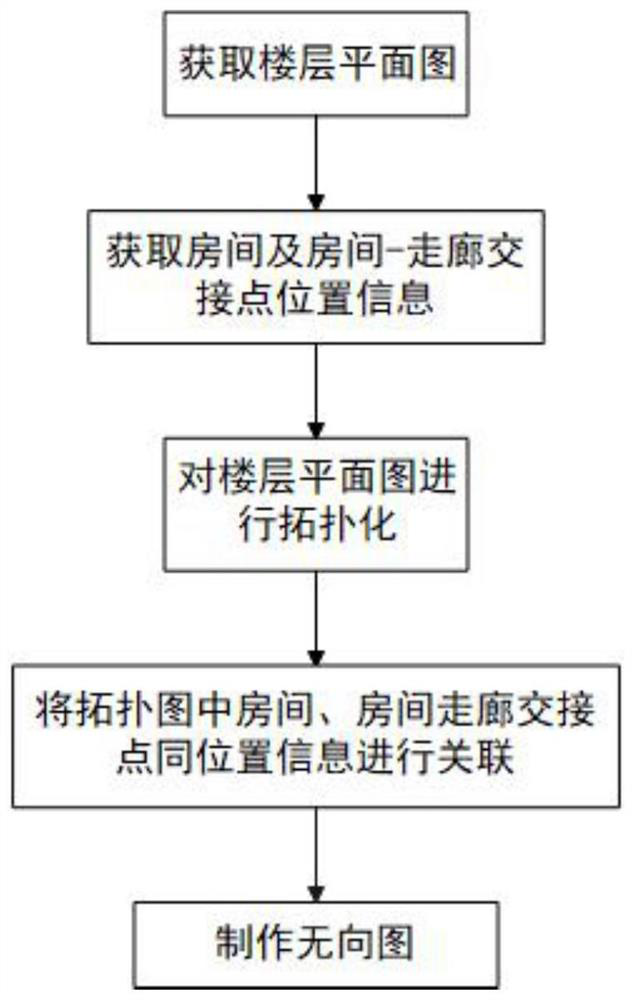
[0084] The above-mentioned users who use this navigation method need to complete the following indoor undirected graph creation steps first (such as image 3 shown):
[0085] Obtain floor plans of buildings (e.g. hospitals) and create preliminary indoor maps (e.g. Figure 4 shown);
[0086] Obtain the location information (coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More