

A Parallel Robot and Its Circular Motion Trajectory Interpolation Method
A robot, parallel technology, applied in the direction of instrument, program control, electrical program control, etc., can solve the problems of increasing process, reducing work efficiency, low clamping accuracy, etc., to achieve the effect of high clamping accuracy and improving work efficiency
Active Publication Date: 2022-06-03
广州市新豪精密科技有限公司
View PDF9 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] However, when the existing three-degree-of-freedom parallel robot is in use, it only has the function of moving. When the workpiece is moved and unloaded, it cannot perform a full range of visual inspection on the workpiece at the same time, thereby increasing the process and reducing work efficiency. For irregular workpieces, the position of the workpiece is only calculated through image acquisition, the clamping accuracy is low, and the workpiece is easily damaged
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
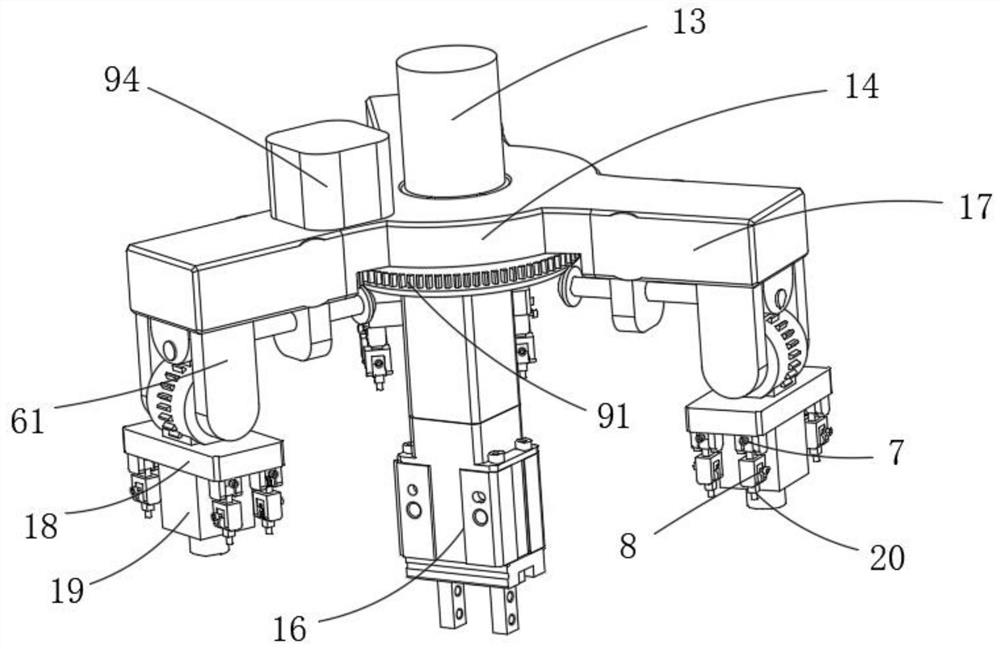
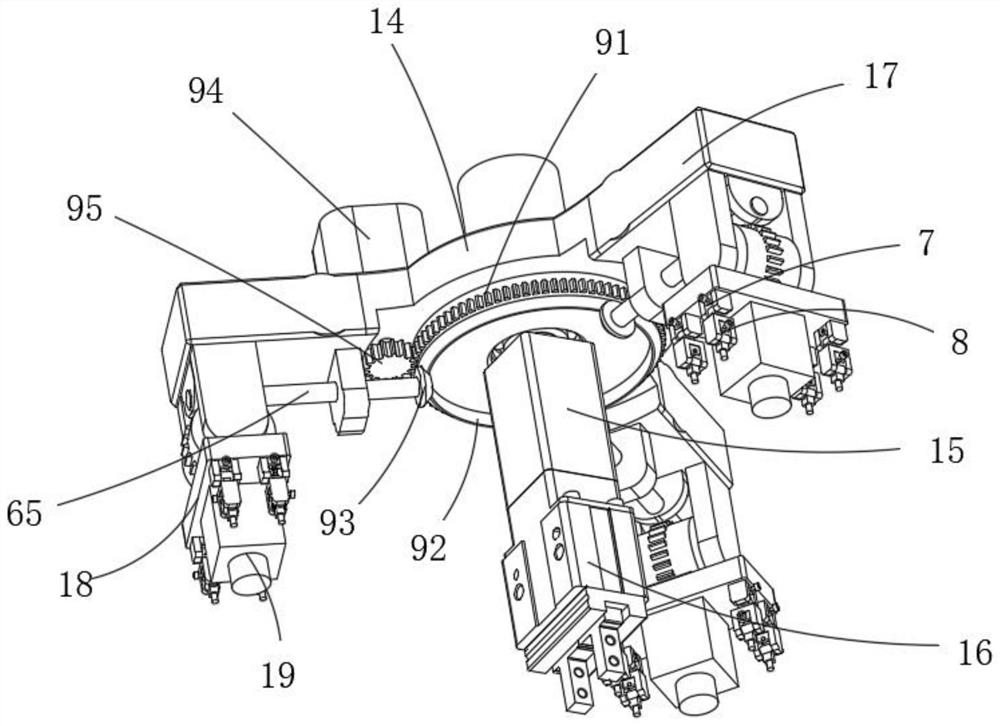
[0046] Referring to Figure 6, the second angle adjustment mechanism 7 includes a third fixed plate 71, a second rotating block 72, a second worm gear 73,
[0050] The first servo motor 2, the second servo motor 94 and the third servo motor 51 are all geared motors.
[0055]
[0059]
[0066] The circuits and controls involved in the present invention are all in the prior art, and will not be repeated here.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
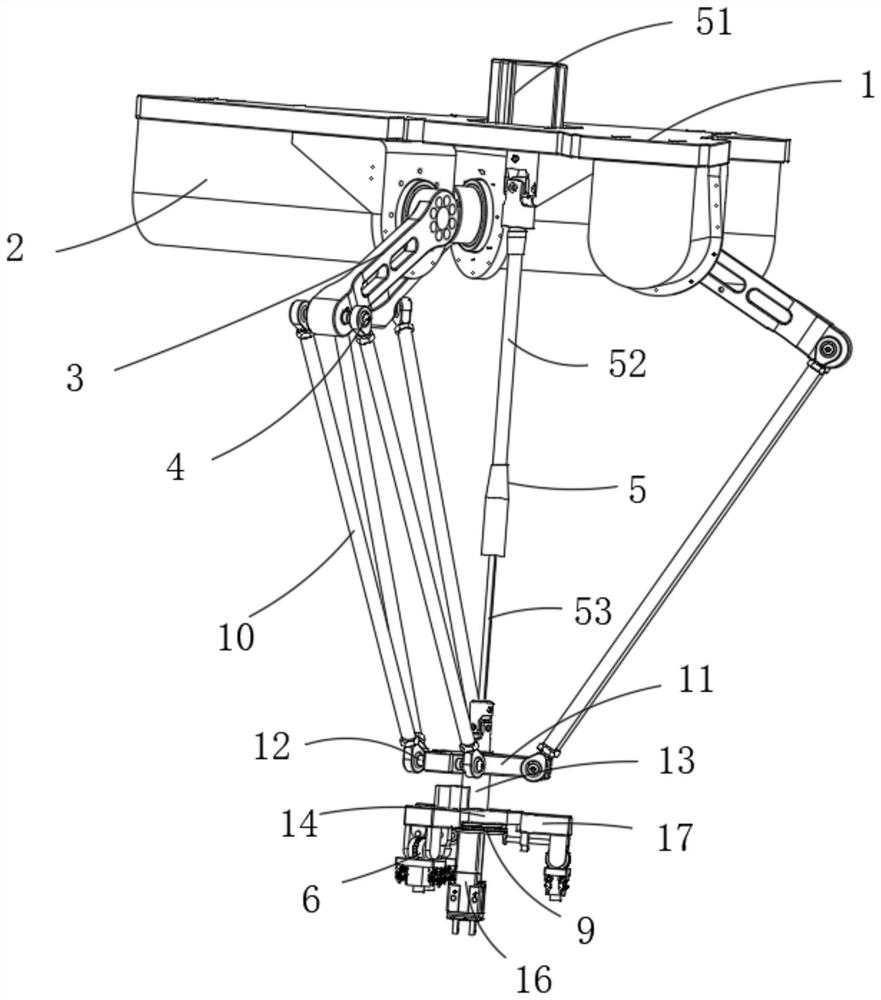
The present invention provides a parallel robot, which includes a first mounting plate, a first servo motor, a swing arm, a first fixed shaft, a connecting rod, a fixed platform and a second fixed shaft, and the lower surface of the first mounting plate is equidistantly fixed with A first servo motor, the output end of the first servo motor is fixed with a swing arm, one end of the swing arm is symmetrically fixed with a first fixed shaft, and the first fixed shaft is rotatably connected to a connecting rod through a spherical bearing, and the first fixed shaft is connected to a connecting rod through a spherical bearing. A fixing platform is arranged under the installation plate, and the triangles of the fixing platform are all symmetrically fixed with second fixing shafts. The invention can carry out all-round visual detection on the workpiece through three CCD cameras, so that the robot can visually detect the workpiece while loading and unloading the workpiece, greatly improving the work efficiency, and the position of the workpiece can be checked by the laser positioner Perform precise positioning and clamping, so that the driving fixture can accurately clamp the workpiece, with high clamping accuracy, and is suitable for positioning and clamping of special-shaped workpieces.
Description
A parallel robot and its circular arc motion trajectory interpolation method technical field The present invention relates to parallel robot technical field, relate in particular to a kind of parallel robot and its circular arc motion trajectory inserter supplement method. Background technique Robot (English name: Robot) is an automated machine, the difference is that this machine has some Intellectual abilities that are similar to objects, such as perception, planning, motor, and coordination, are a highly flexible Robots can assist or even replace humans to complete dangerous, heavy and complex work and improve work efficiency Quality, serve human life, expand and extend the range of human activities and capabilities, while parallel robots are driven by multiple drives simultaneously. The joint work can be defined as the moving platform and the fixed platform are connected by at least two independent kinematic chains, and the mechanism has two or A closed-loop ...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G05B19/4103
CPCG05B19/4103G05B2219/34169
Inventor胡进杰张颂哲周庆刚曾广胜吴凯平张世林
Owner广州市新豪精密科技有限公司