

Networked surface ship tracking control method, device, equipment and storage medium
A tracking control and control algorithm technology, applied in the fields of equipment and storage media, devices, and networked surface ship tracking control methods, can solve problems such as low efficiency, limited degree of freedom of surface vehicles and limited working space, and achieve a highly practical Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to have a clearer understanding of the technical features, objects and effects of the present invention, the specific embodiments of the present invention will now be described in detail with reference to the accompanying drawings.
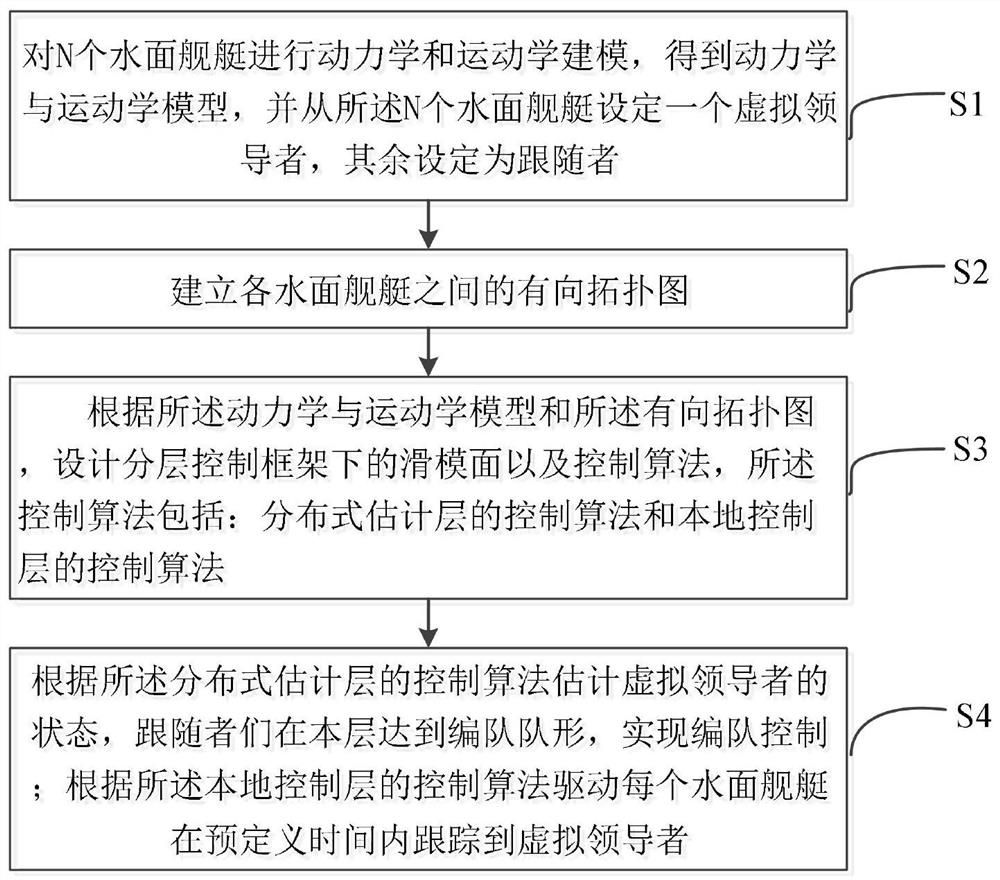
[0058] refer to figure 1 , figure 1 A flow chart of a method for tracking and controlling a networked surface ship of a surface ship provided by an embodiment of the present invention;
[0059] S1. Perform dynamic and kinematic modeling on N surface ships to obtain a dynamic and kinematic model, and set a virtual leader from the N surface ships, and set the rest as followers;
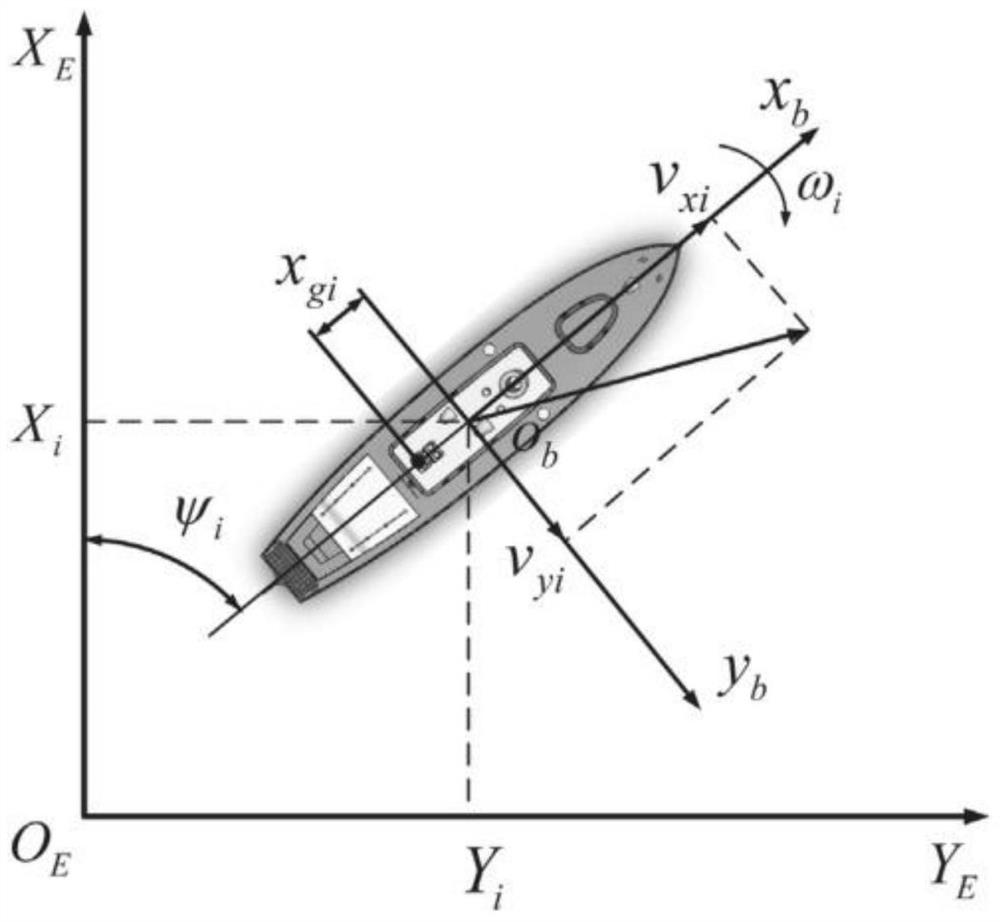
[0060] The expression of the dynamics and kinematics model is:
[0061]
[0062] Among them, i∈{1,2,…,N} represents the serial number of the surface ship, Indicates the position of the fixed point on the earth (X i ,Y i ) coordinates, (Ψ i ) is the heading angle, represents the set of real numbers, represents an n-dimensional Euclidean space; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More