

Bionic flexible mechanical wrist device for quarantine sampling
A manipulator claw and mechanical technology, applied in the field of bionic flexible mechanical wrist devices, can solve the problems of limited movement angle, insufficient compact structure, insufficient flexibility, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
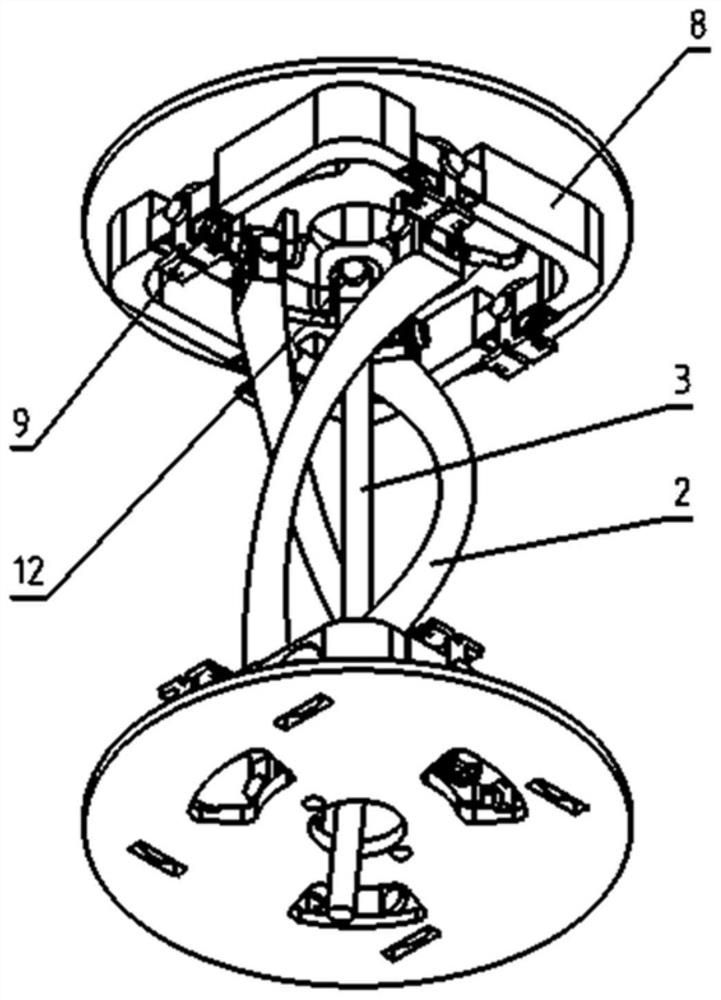
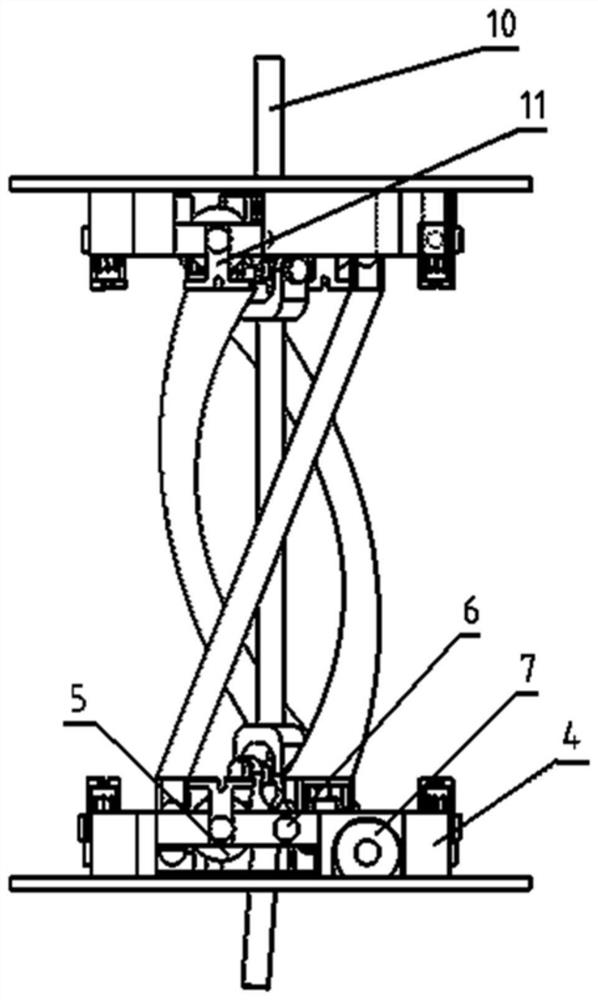
[0027] Such as Figure 1 ~ Figure 3 As shown, a bionic flexible mechanical wrist device for quarantine sampling includes two parallel platforms 1 arranged up and down opposite each other, and the middle U-axis 3 and three connecting rods 2 are connected between the upper parallel platform 1 and the lower parallel platform 1, Three connecting rods 2 are symmetrically arranged around the middle U-axis 3, and the connecting rods 2 have a curved structure. In this embodiment, the two ends of the connecting rods 2 are respectively fixedly connected to the upper parallel platform 1 and the lower parallel platform 1 by screws;
[0028] One end of the middle U-axis 3 is connected to the mechanical claw, and the other end of the middle U-axis 3 is connected to the first motor. By controlling the rotation of the first motor, the rotation of the middle U-axis 3 is controlled to make the mechanical claw rotate accordingly. This implementation In the example, the two ends of the middle U-a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More