

A real-time path planning and control method for headland steering of agricultural unmanned vehicles
A technology for real-time path planning and unmanned vehicles, applied in vehicle position/route/height control, two-dimensional position/course control, control/regulation system, etc., can solve the problems of reduced accuracy, increased energy consumption, and track length Growth and other issues, to achieve the effect of reducing energy consumption, improving accuracy, and reducing mechanical loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, but not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
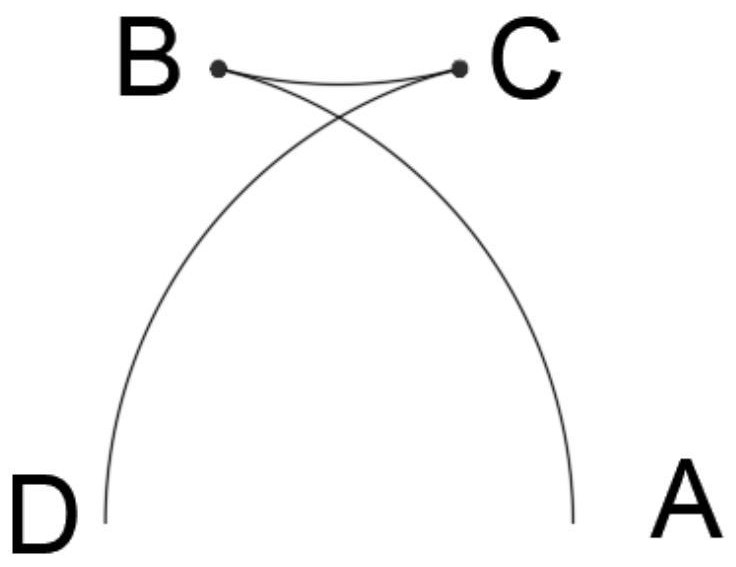
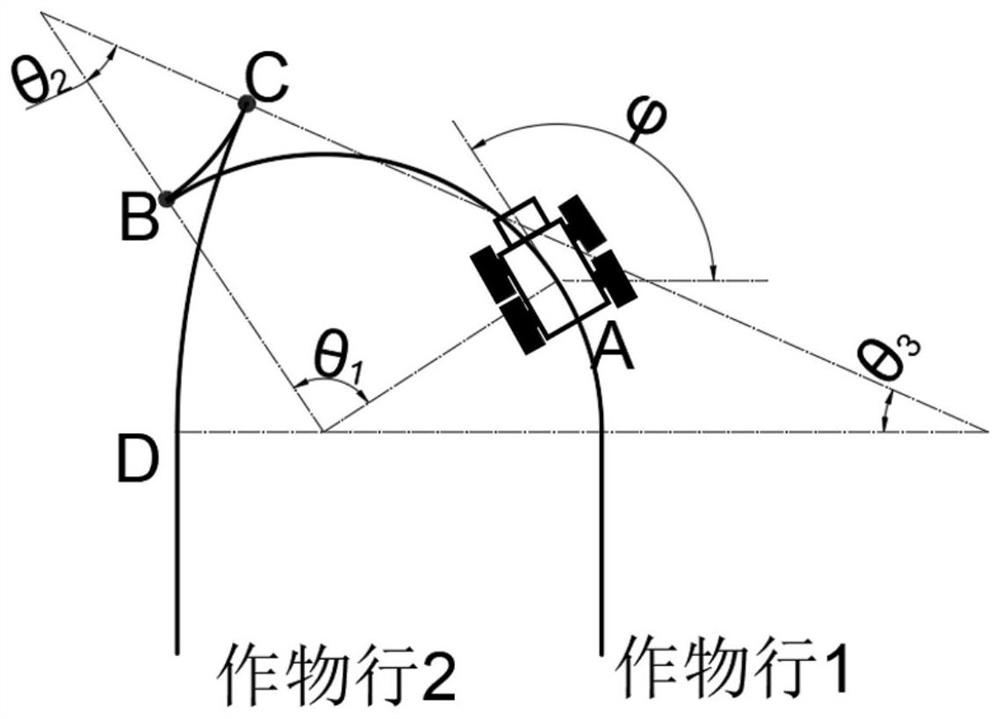
[0034] like figure 1 As shown, the track of the vehicle head turning is: the vehicle starts from point A, turns forward to point B (end point B) with the minimum forward turning radius, and then starts to reverse until point C (end point C), the vehicle still remains when reversing Turn with the minimum turning radius for reversing. Finally, from point C, the vehicle traces the route in pure tracking control and reaches the target point D. The process from p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More