

Variable-structure rope traction parallel robot for automobile collision test
A collision test and variable structure technology, which is applied in the field of automobile collision test, can solve the problems of slow response speed, single project, and small test vehicle movement space, and achieve the effect of flexible speed control and small occupied area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and preferred embodiments.
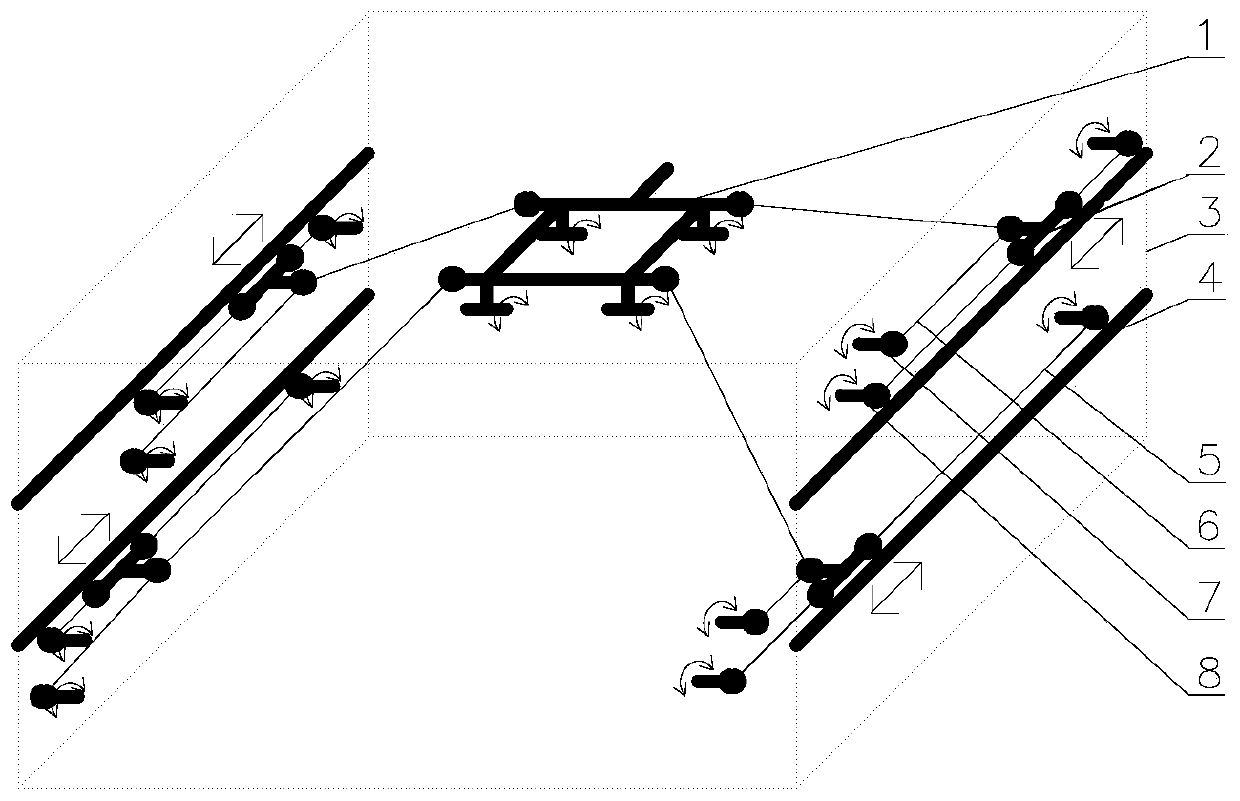
[0030] The specific structure of the present invention can be designed according to the needs of the automobile collision test, and the number of end effector traction ropes must be more than the degree of freedom of the end effector. The specific implementation of the present invention will now be described by taking a robot that can realize three-degree-of-freedom movement of an end effector and adopts four end effector traction ropes as an example.
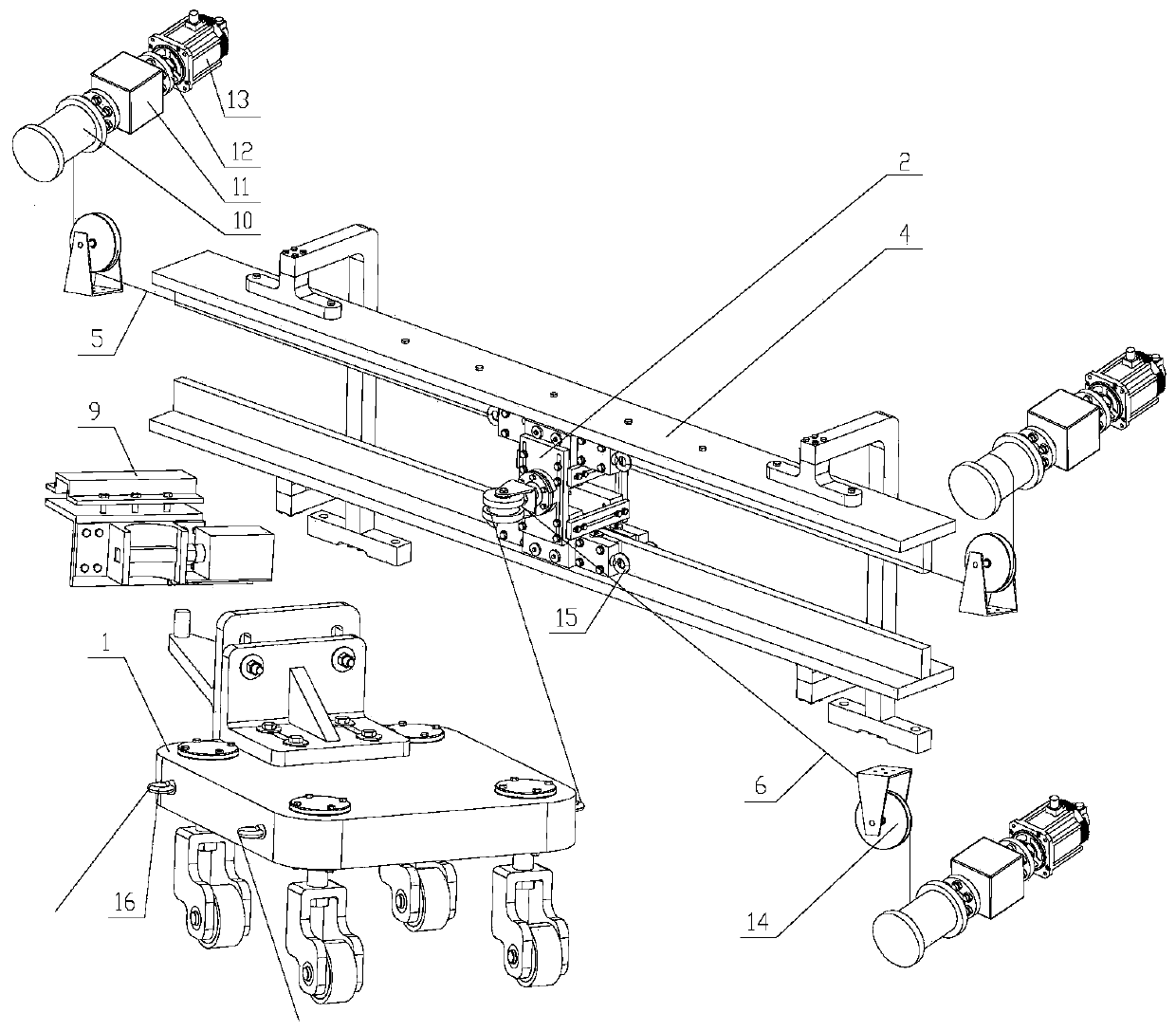
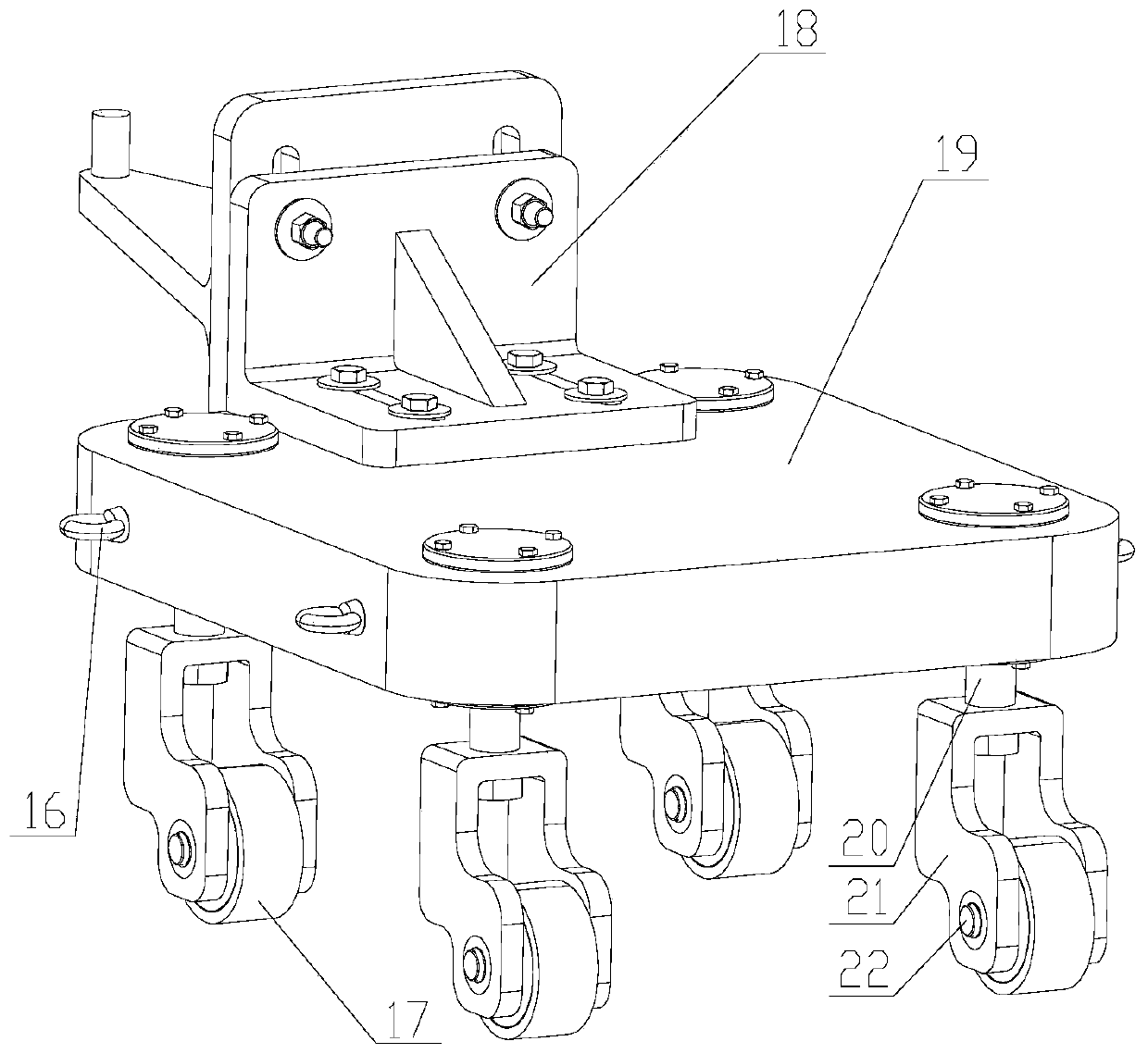
[0031] see figure 1 , the embodiment of the present invention is provided with an end effector 1, a movable universal hinge point 2, a frame 3, a guide rail assembly 4, a universal hinge point traction rope 5, an end effector traction rope 6, an end effector drive assembly 7, Universal hinge point driving assembly 8; the end effector 1 is pulled by the end ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More