Variable-structure rope-traction parallel robot for wind tunnel test
A wind tunnel test and rope traction technology, applied in the field of robotics, can solve the problems of small movement space of the model, damage to the air flow field, and single experimental items, and achieve the effects of small air flow field interference, fast response speed, and expanded work space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
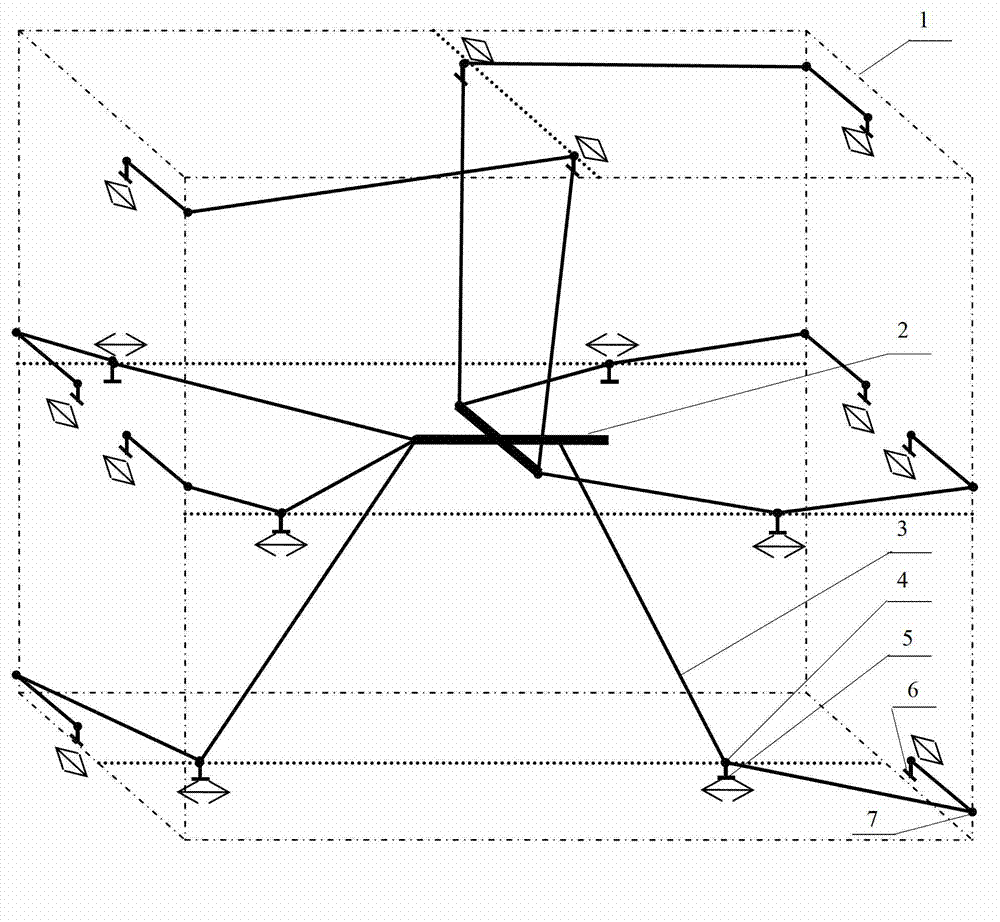
[0021] The specific structure of the present invention can be designed according to the requirements of wind tunnel tests and the shape of the model, and the number of towing ropes must be more than the freedom of movement of the aircraft model.
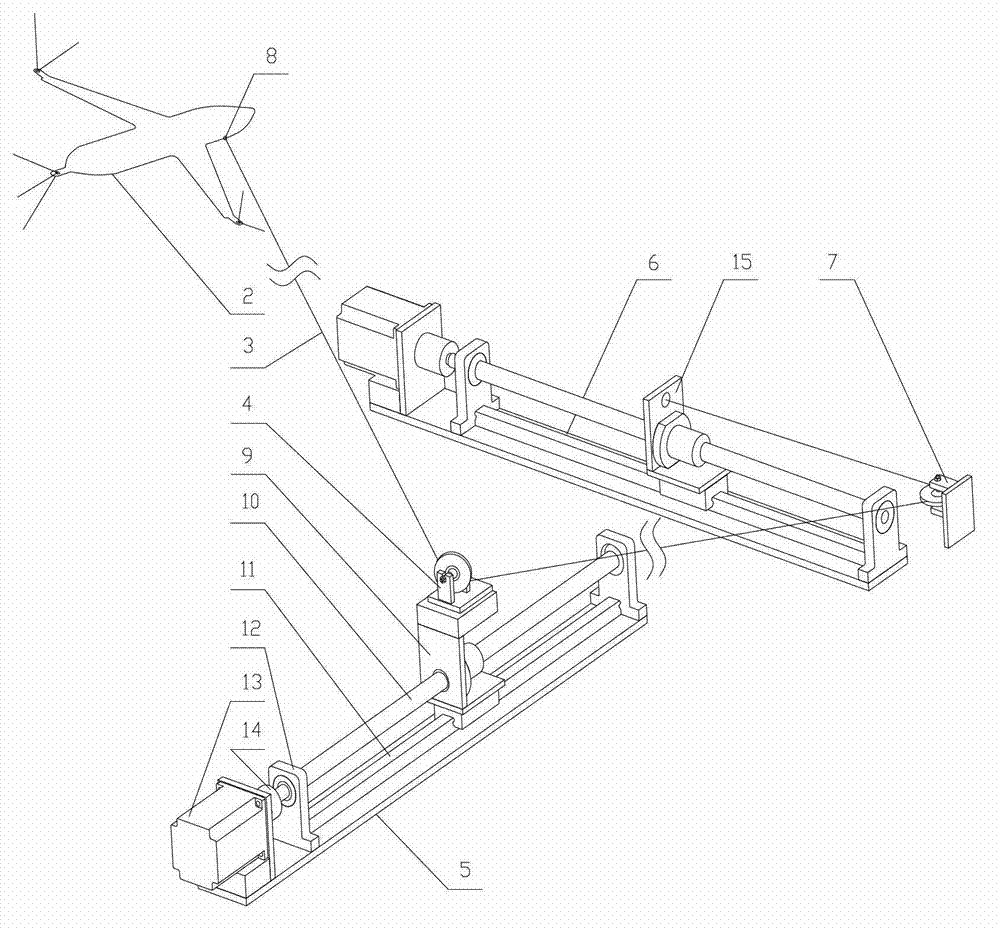
[0022] Now, the specific implementation scheme of the present invention is explained by taking a robot that can realize the six-degree-of-freedom movement of the aircraft model and 8 traction ropes as an example.
[0023] See Figure 1~3 The embodiment of the present invention is provided with a frame 1, an aircraft model 2, a towing rope 3, a movable universal hinge point 4, a movable hinge point driving assembly 5, a towing rope driving assembly 6, and a fixed universal hinge point 7; The aircraft model 2 is towed by the towing rope 3 to achieve six degrees of freedom movement, figure 1 The drive number of the mechanism is greater than the number of degrees of freedom, which is a redundant drive parallel robot.
[0024] figure 1 Each gro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com