Soft robot shape touch multi-mode self-energized flexible sensing system
A perception system and multi-modal technology, applied in the direction of manipulators, friction generators, chucks, etc., can solve the problems that cannot solve the needs of soft robots, rigid sensors cannot be arranged, rigid sensors cannot be detected, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
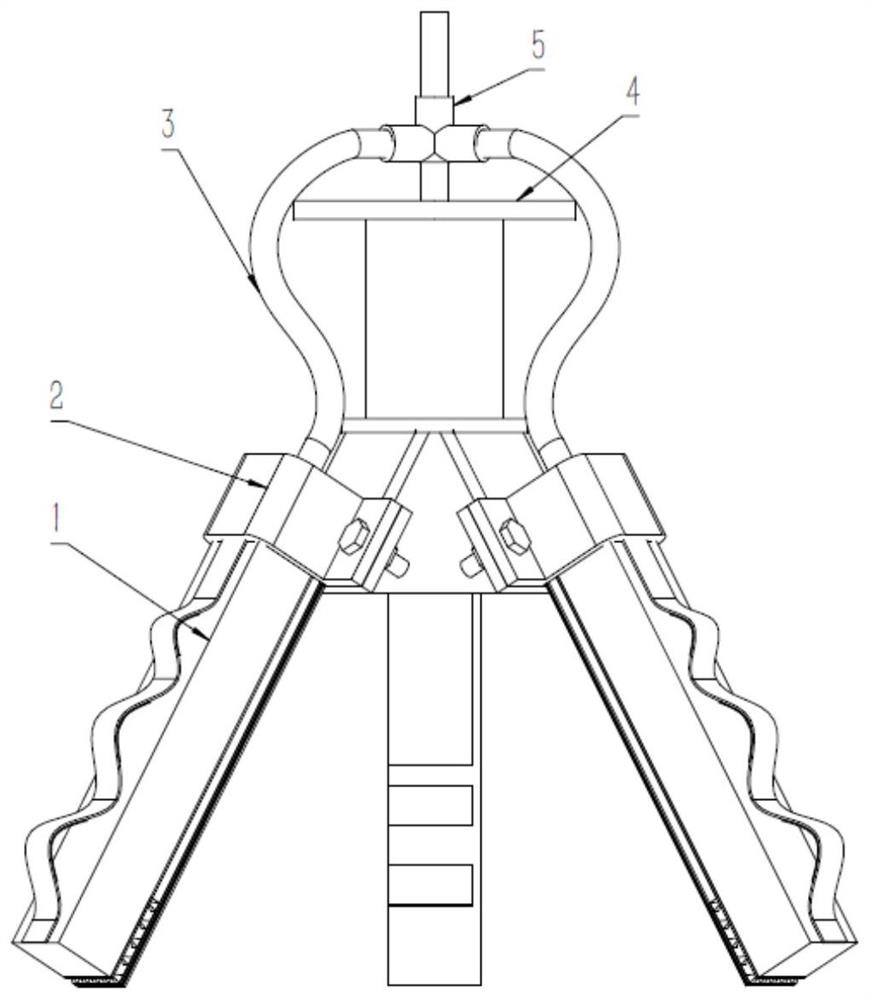
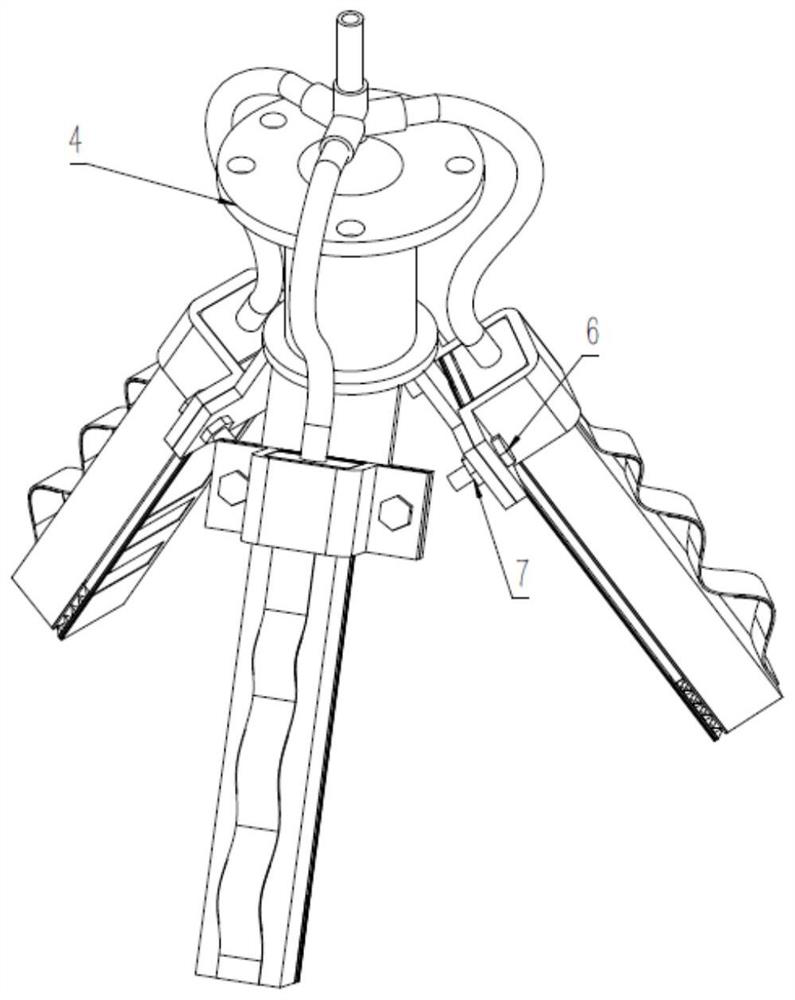
[0030] Such as figure 1 and 2 As shown, a three-claw soft robot with a shape-touch multimodal flexible sensing system includes a soft finger 1 with shape and tactile perception functions, a clamp 2, an air duct 3, a connecting flange bracket 4, a connecting valve 5, and M2 The connecting screws 6, the M2 connecting nuts 7, and the soft fingers 1 are arranged in a circle with an interval of 60°, and are installed at an inclination angle of 15°.
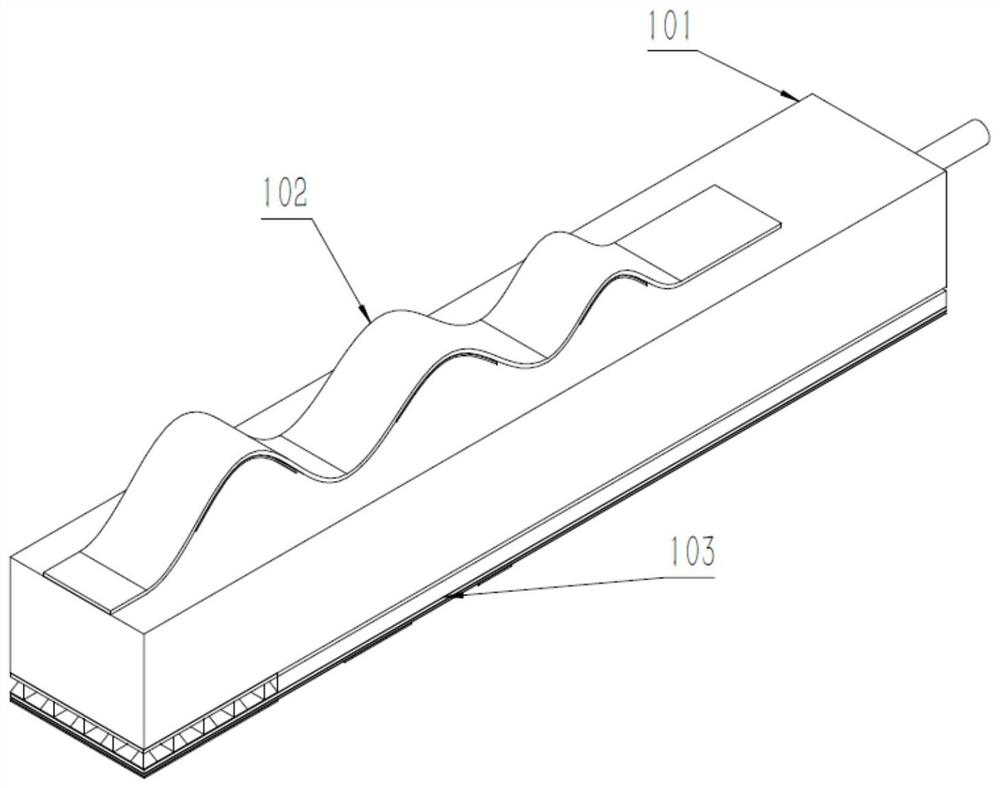
[0031] Such as image 3 As shown, the soft finger 1 with shape sensing and tactile sensing functions includes a pneumatic soft finger 101, a shape sensing sensor 102 and a tactile sensing sensor 103, and the shape sensing sensor 102 is arranged on the bending layer of the soft finger 1 to detect the bending of the finger state, the tactile sensing sensor 103 is arranged in contact with the inner side of the soft finger 1 to obtain information generated when the soft robot interacts with the outside world. Pneumatic soft finger 101 i...
Embodiment 2
[0033] This embodiment is basically the same as Embodiment 1, especially in that:
[0034] Such as Figure 4 As shown, the soft robot form perception sensor includes a variable-height waveform flexible electrode 202, a positive nickel cloth friction layer 201 and a silicone negative friction layer 203, and the variable-height waveform flexible electrode is installed on the bending side of the soft robot. When entering, the side of the soft finger will elongate and bend, and at the same time, the wave-shaped flexible electrode will change from an arched state to a flat state, driving the positive friction layer on the flexible electrode to rub against the silicone surface of the soft finger as a negative friction layer , a certain charge transfer will occur based on the triboelectric principle, thereby generating a voltage signal. Since the flexible electrode has the characteristic of variable height, waveforms of different heights will contact in sequence during the bending p...
Embodiment 3
[0036] This embodiment is basically the same as Embodiment 1, especially in that:
[0037] Such as Figure 5As shown, the multi-modal tactile sensing sensor for the soft robot includes a triboelectric-based tactile sensor and a capacitive-based grip sensor, which are separated by a PDMS isolation layer 306 . The triboelectric tactile sensor is based on the principle of single-electrode triboelectricity, which includes a variable-area electrode layer 302 and a friction layer 301. The other friction layer of the single-electrode triboelectricity is a contact object. When an external object is in contact with the friction layer, a voltage is generated. Signal, and with the increase of the contact area, the signal has a linear relationship with the area. Since the variable-area electrode layer 302 is arranged in a variable area, objects with the same contact area will generate different signal values when they contact electrodes with different areas. The larger the electrode ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com