

Fuse wide beam forming method and system based on forward detection beam width index
A beam width and wide beam technology, applied in the field of integrated guidance fuze, can solve problems such as target damage, difficulty in piloting coordination, and insufficient response of the piloting system, so as to ensure continuous detection and tracking, increase the probability of killing, and increase the probability of activation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0056] The present invention proposes a fast calculation method for the forward detection beam width, which is used to calculate the beam width of the guidance integrated fuze in the forward detection wide beam forming process, and solves the problem of detection and tracking of ultra-high-speed targets by the large rendezvous angle attack situational fuze. Thereby increasing the probability of missile kill.
[0057] According to a method of fuze wide beamforming based on the forward detection beam width index provided by the present invention, such as figure 1 shown, including:
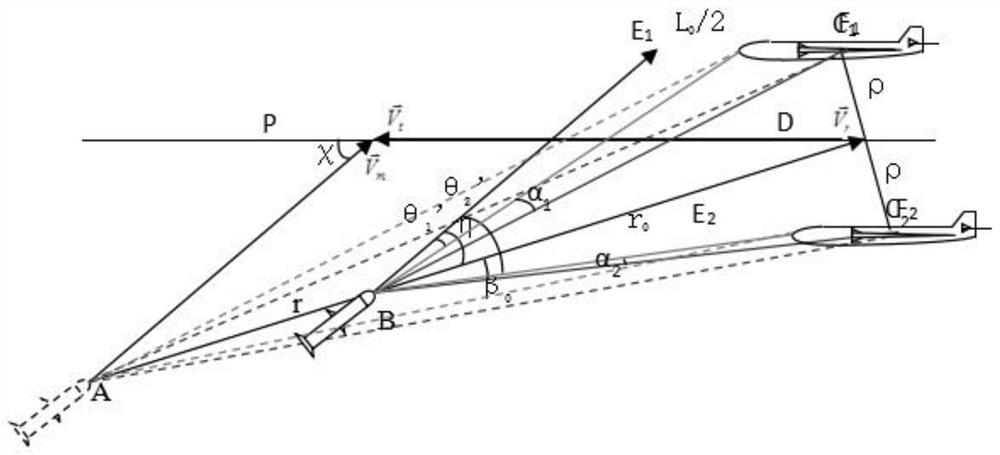
[0058] Step S1: Under the preset intersection conditions, through the analysis of the relative position and angular geometry of the projectile in the encounter section, establish a mathematical model of the boundary of the forward detection beam;
[0059] Step S2: Analyze the change trend of the boundary of the forward detection beam, and obtain the intersection condition corresponding to the maximu...
Embodiment 2
[0103] Embodiment 2 is a preferred example of embodiment 1
[0104] The fast calculation method of the forward sounding beam width proposed by the present invention comprises the following steps:
[0105] (1) Under the given rendezvous conditions, the mathematical model formula of the forward detection beam boundary is deduced through the analysis of the relative position and angular geometric relationship of the projectile in the encounter section;
[0106] (2) Analyze the trend of forward detection beam boundary with missile speed, target speed, rendezvous angle, detection distance, miss distance, missile angle of attack, angle pointing error, target geometric size, data processing time, etc., and find out its maximum value;
[0107] (3) The calculated maximum value of the forward detection beam boundary is used as the value of the forward detection beam width, and the forward wide beamforming design of the integrated guidance fuze is carried out.
[0108] The mathematical ...
Embodiment 3
[0112] Embodiment 3 is a preferred example of embodiment 1 and / or embodiment 2
[0113] The present invention provides a method for fuze wide beamforming based on the forward detection beam width index, including:
[0114] Step 1: Determine the missile velocity vector modulus when the missile-target encounters Target velocity vector modulus Rendezvous angle χ, detection distance r, miss amount ρ, missile attack angle γ m , Angle pointing error Δθ, target geometric size L 0 , data processing time t 0 Values, such as missile speed 1000m / s~2000m / s, target speed 1000m / s~3000m / s, rendezvous angle 0°~20°, detection range 200m~300m, miss distance 0m~8m, missile attack angle 0°~ 5°, angle pointing error maximum 2°, target geometric size 8m~25m, data processing time maximum 2ms.
[0115] Step 2: Deduce the mathematical model formula of the forward sounding beam boundary:
[0116] θ 0 =max(2θ 10 ,2θ 20 )
[0117] In the formula:
[0118] θ 10 = θ 1 '+γ m +Δθ
[0119] θ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More