

Unmanned ship track tracking control method based on sliding mode control and control distribution
A track tracking and control distribution technology is applied in the track tracking control field of unmanned boats to achieve the effects of reducing track tracking errors, ensuring stability, and improving track tracking control performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail with reference to the accompanying drawings. This description presents, by way of illustration and not limitation, specific embodiments consistent with the principles of the invention in sufficient detail to enable those skilled in the art to practice the invention without departing from this disclosure. Other embodiments may be utilized and the structure of elements may be changed and / or substituted within the scope and spirit of the invention. Accordingly, the following detailed description should not be read in a limiting sense.
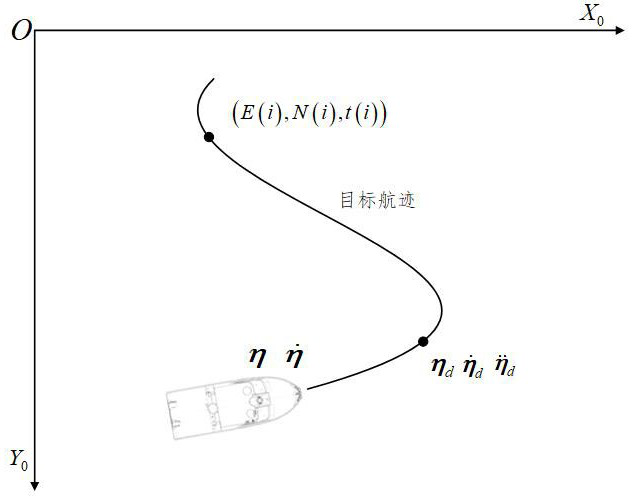
[0028] figure 1 It is a schematic diagram of the track tracking motion model of the unmanned vehicle. A track tracking control method for unmanned boats based on sliding mode control and control distribution proposed by the present invention can generate control instructions according t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More