

Unmanned ship track tracking control method based on disturbance observer and RBFNN
A technology for interfering with observers and track tracking, applied in the field of track tracking control of unmanned boats, to achieve the effects of improving track tracking control performance, reducing track tracking errors, and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
[0034] Implementation technical scheme of the present invention is:
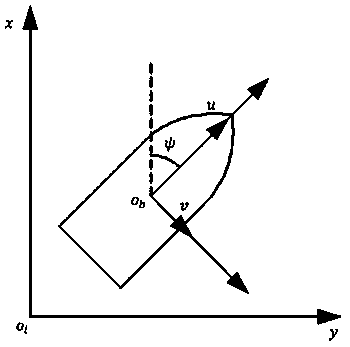
[0035] Step 1: Considering model uncertainty and external disturbance comprehensively, establish the nonlinear dynamic model of unmanned vehicle, see figure 1 , the nonlinear dynamic model of the unmanned vehicle is established as:
[0036]
[0037]
[0038] Among them, τ represents the control force / moment of the U...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More