Underwater multi-AUV path planning method based on improved sparrow search algorithm
A technology of path planning and search algorithm, applied in two-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc. AUV path planning, slow convergence speed of ant colony algorithm, etc., to achieve the effect of dynamic safety obstacle avoidance, reduced energy consumption, and less parameter settings
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
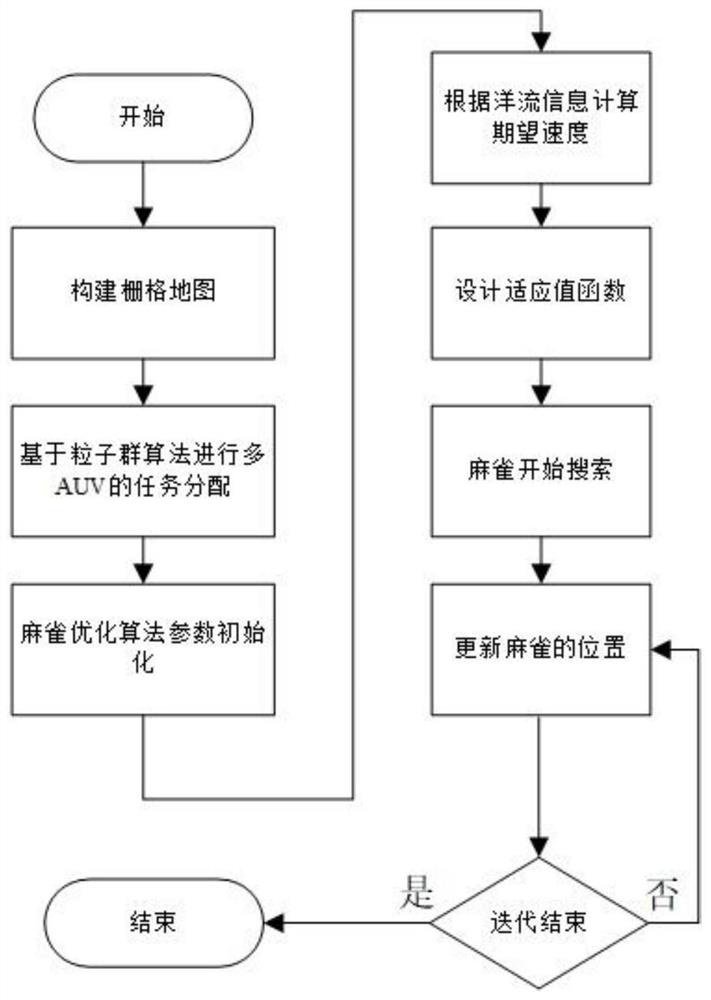
[0064] Such as figure 1 As shown, the present invention is based on the underwater multi-AUV path planning method of the improved sparrow search algorithm. First, the grid method is used to model the two-dimensional environment, that is, the grid method is used to construct a two-dimensional map of the marine environment; Tasking of AUVs and multiple targets. Due to the complexity of the marine environment, AUVs are greatly affected by ocean currents when navigating underwater. Therefore, considering the impact of ocean currents on AUVs, the present invention proposes an adaptive value function combined with a speed synthesis method and applies the adaptive value function to the improved sparrow algorithm; The algorithm comprehensively estimates the fitness value of each sparrow based on ocean current information and the current location of the sparrow. After the algorithm is continuously iterated, the solution with the optimal fitness value is found, and then the path planni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More