

Wire transmission structure, surgical instrument and surgical robot
A technology of wire transmission and drive shaft, applied in the field of surgical instruments, can solve the problems of large occupied space and complex transmission structure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
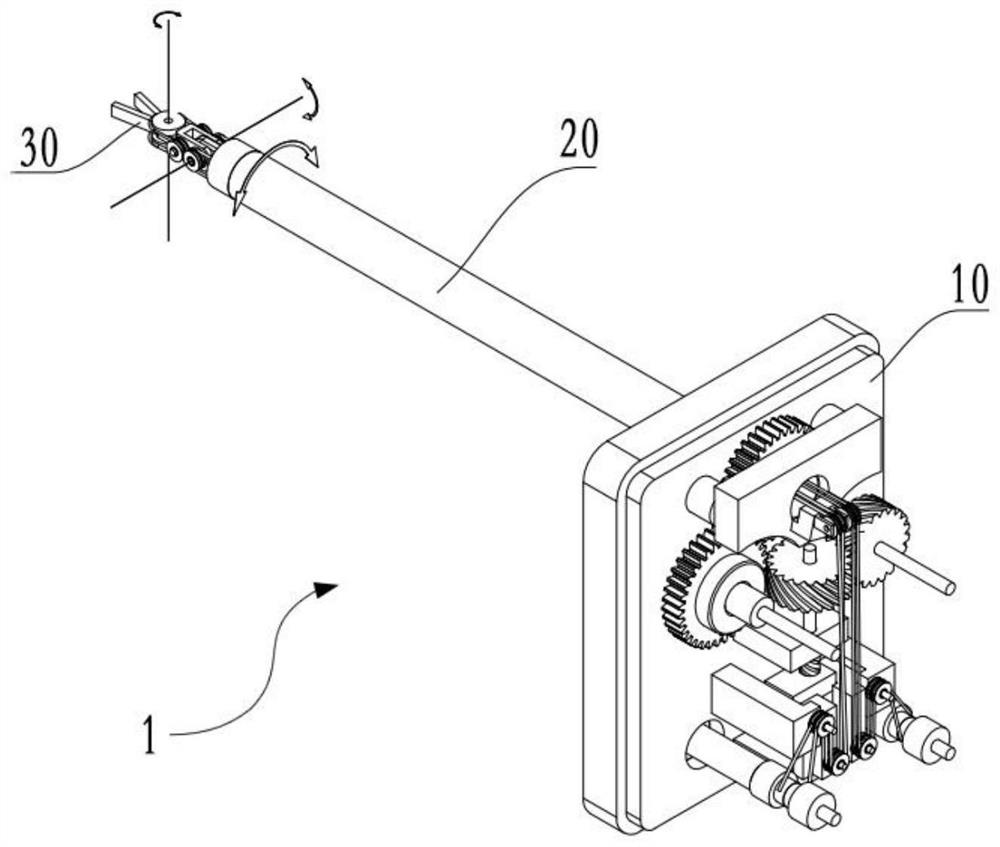
[0123] As shown in FIG. 1, a first embodiment of the present invention provides a surgical instrument, which includes: a wire transmission structure 10, an instrument rod 20
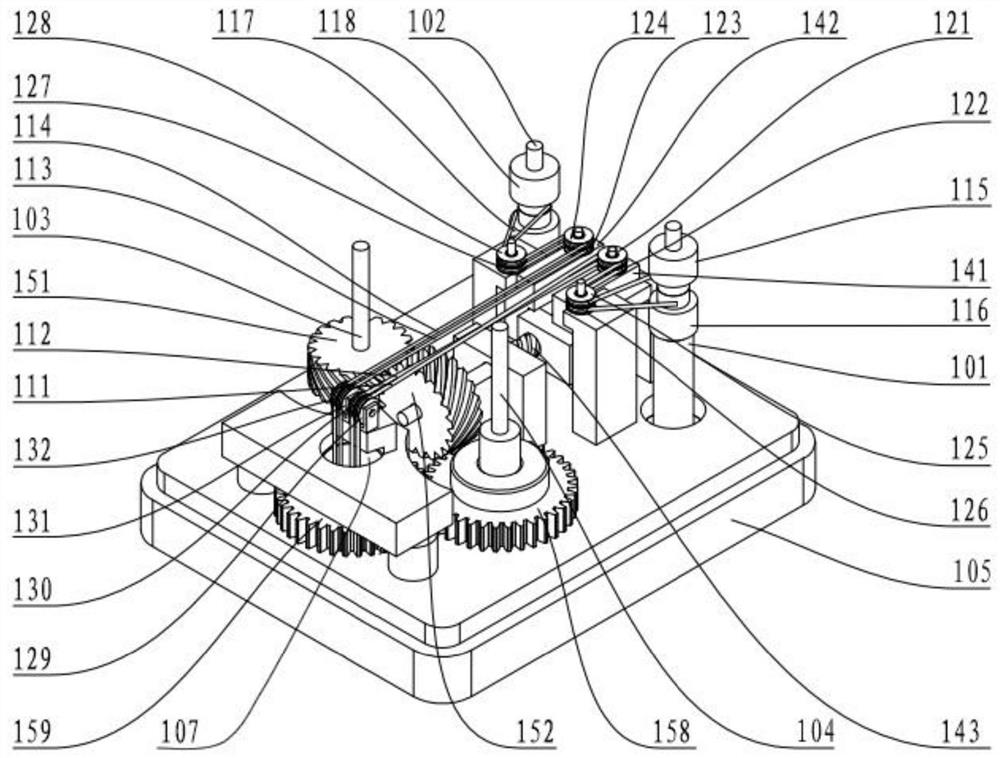
[0124] The following describes the wire transmission structure 10 provided by the embodiment of the present invention with reference to FIGS. 2 to 8 . wire transmission structure
[0125] Wherein, the first drive shaft 101, the second drive shaft 102 and the third drive shaft 103 are respectively rotatably arranged in
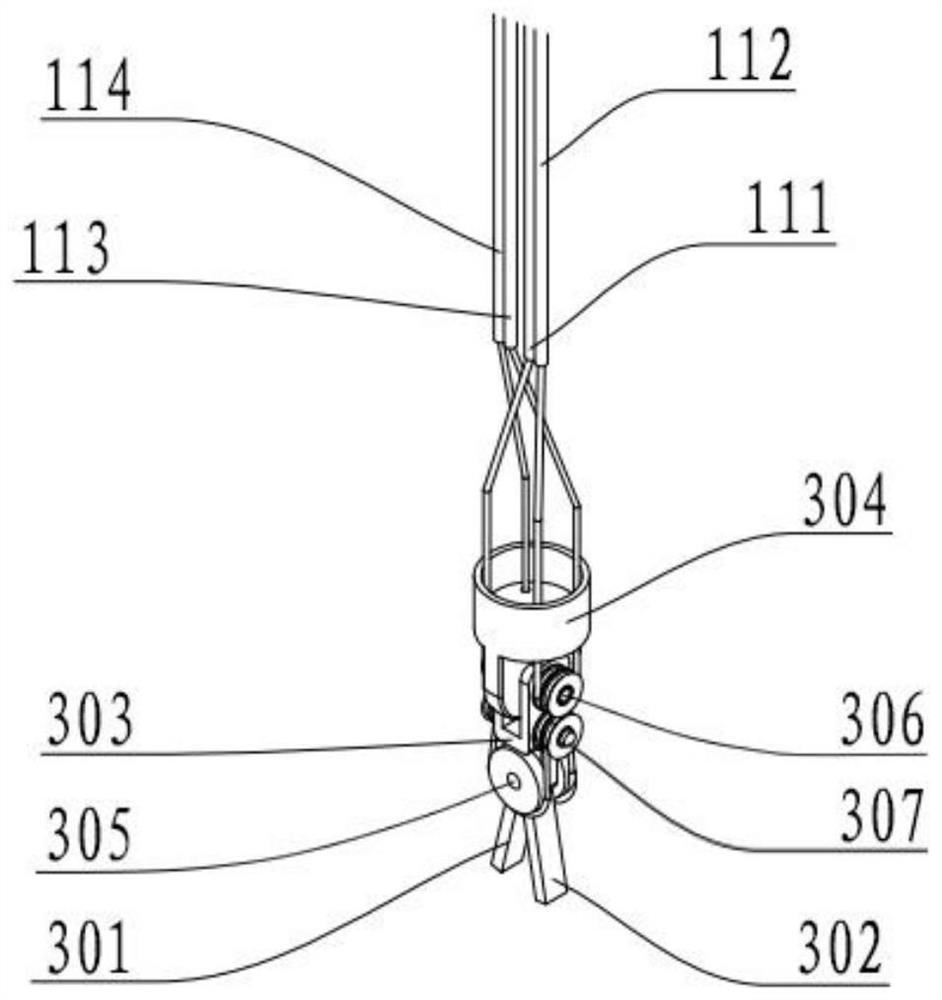
[0126] The second traction body group includes a third traction body 113 and a fourth traction body 114. The third traction body 113 has a
[0127] The first guide member is used to change the extension direction of the first traction body group, and the second guide member is used to change the extension direction of the first traction body group.
[0128] The third guide member and the fourth guide member are both arranged on the base 105. Wherein, the third guide is relative to the first ...
Embodiment 2
Again, only different points will be described below.
[0153] Please refer to FIG. 9, which is a schematic diagram of the transmission of the surgical instrument provided in the second embodiment of the present invention.
[0154] In the second embodiment, the transmission mode between the third drive shaft 103 and the transmission rod 143 is different from that in the first embodiment.
Embodiment 3
[0156] The wire transmission structure and the surgical instrument of the third embodiment of the present invention are basically the same as the first embodiment, and the same parts are not
[0158] In the third embodiment, the setting form of the transmission rod 143 is different from that in the first embodiment. Specifically, as shown in Figure 10 and Figure 11
[0159] Further, the wire transmission structure also includes a first transmission assembly, and the first transmission assembly includes a first tooth
[0160] Further, the transmission ratio of the first gear 153 and the second gear 154 is the same as the second external thread segment
[0162] In some alternative embodiments, the wire transmission structure further includes a rotating member, a first transmission member, and a second transmission member
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More