

An emergency suspension device for a submarine sonar robot
A suspension device and robot technology, which is applied in the direction of motor vehicles, transportation and packaging, special-purpose ships, etc., can solve the problems of equipment separation, video transmission channel number and transmission distance limitation, and affect the rational use of resources, etc., to achieve an increase in the adsorption effect Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
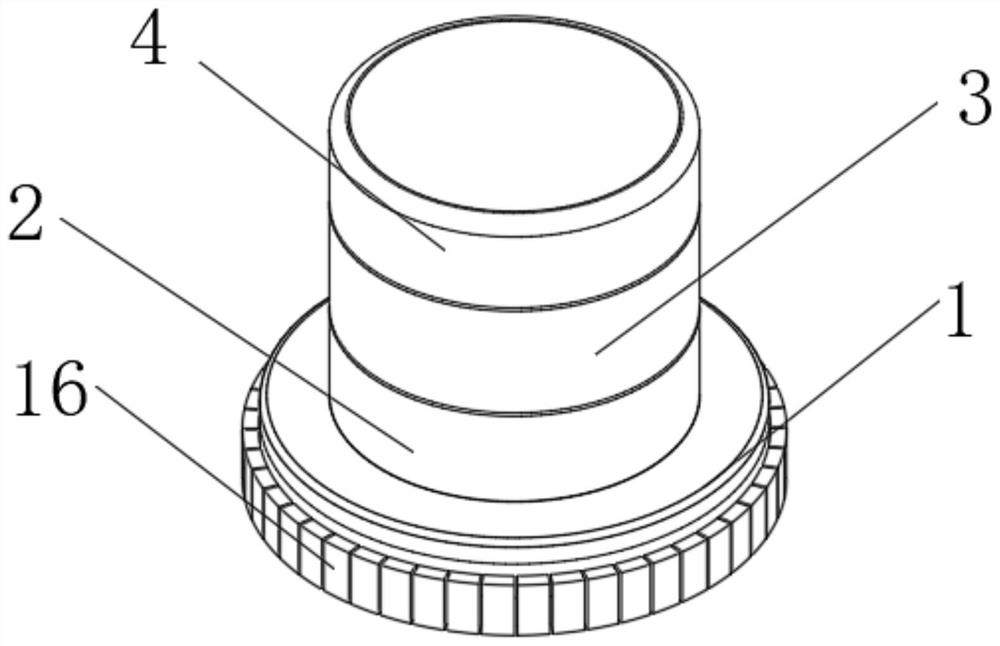
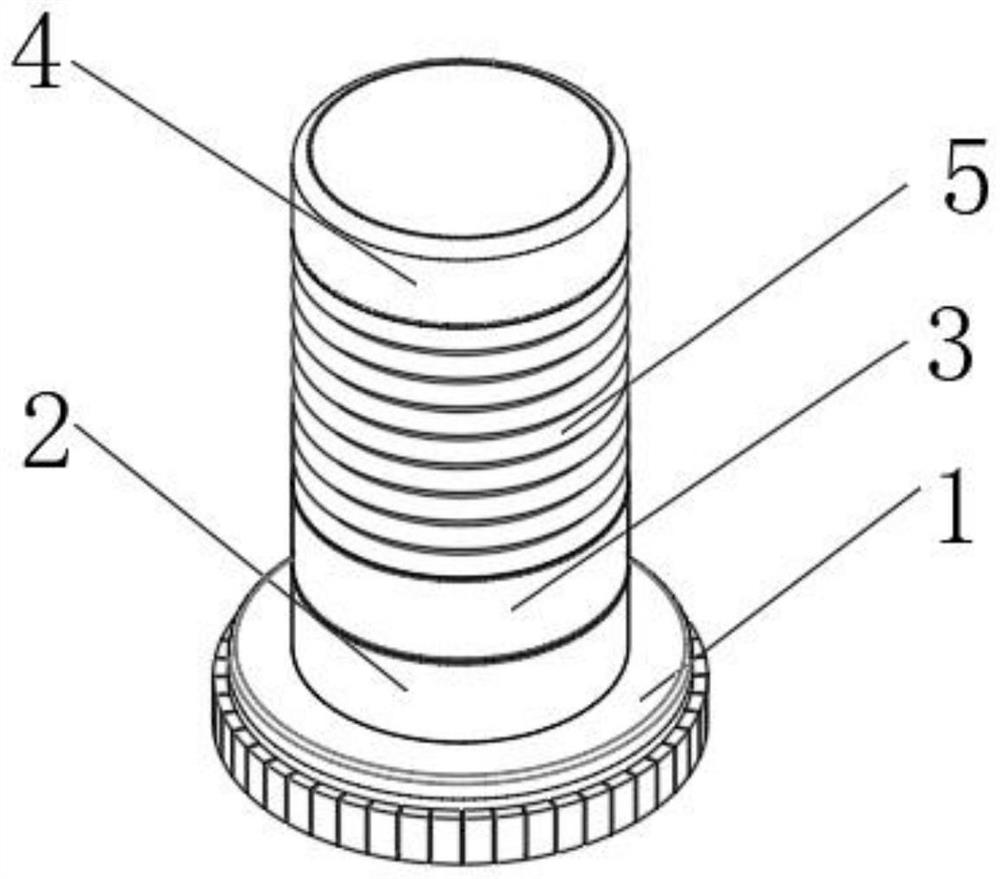
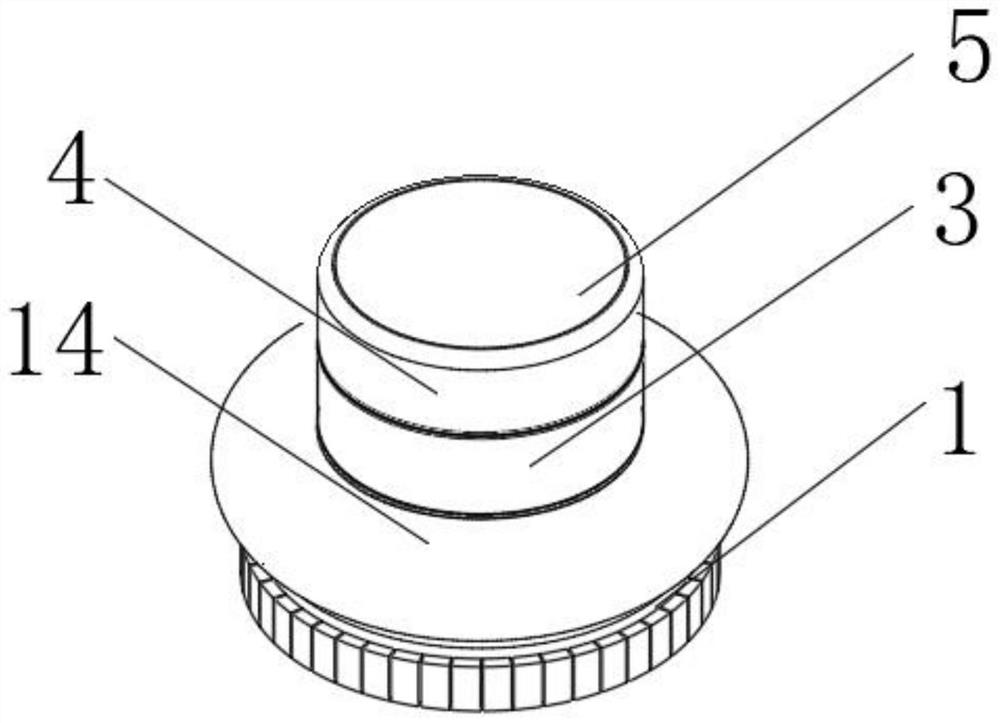
[0027] Embodiment 1, with reference to Figure 1-6 As shown, an emergency suspension device for a submarine sonar robot includes: a connecting base 1, the top of which is sequentially connected with a cylindrical support tube 2, a connecting ring 3 and a top cover 4 from bottom to top, and on the connecting ring 3 The bellows 5 is connected with the top cover 4, and a folded airbag cover 14 is arranged between the connecting ring 3 and the support cylinder 2, and the airbag cover 14 is located in the low-pressure area.
[0028] The slow-rising mechanism includes the No. 1 self-locking motor 6 installed on the inner top surface of the top cover 4 and the mounting seat 8 installed on the inner wall of the connecting ring 3, and the No. 1 screw rod 7 installed on the output shaft of the No. 1 self-locking motor 6 It is threadedly connected with the threaded cylinder 9 installed at the center of the mounting seat 8, and an air bag is arranged between the top cover 4 and the connec...
Embodiment 2
[0051] Embodiment 2, with reference to Figure 1-6 As shown, an emergency suspension device for a submarine sonar robot includes: a connecting base 1, the top of which is sequentially connected with a cylindrical support tube 2, a connecting ring 3 and a top cover 4 from bottom to top, and on the connecting ring 3 The bellows 5 is connected with the top cover 4, and a folded airbag cover 14 is arranged between the connecting ring 3 and the support cylinder 2, and the airbag cover 14 is located in the low-pressure area.
[0052] The slow-rising mechanism includes the No. 1 self-locking motor 6 installed on the inner top surface of the top cover 4 and the mounting seat 8 installed on the inner wall of the connecting ring 3, and the No. 1 screw rod 7 installed on the output shaft of the No. 1 self-locking motor 6 It is threadedly connected with the threaded cylinder 9 installed at the center of the mounting seat 8, and an air bag is arranged between the top cover 4 and the connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More