

Rapid stereo matching method based on ZSAD-Census
A stereo matching and fast technology, applied in the field of computer vision, can solve the problems of high power consumption and high area cost, and achieve the effect of increasing matching accuracy, strong anti-interference and high stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0072] This application proposes a fast stereo matching method based on ZSAD-Census, including the following steps:
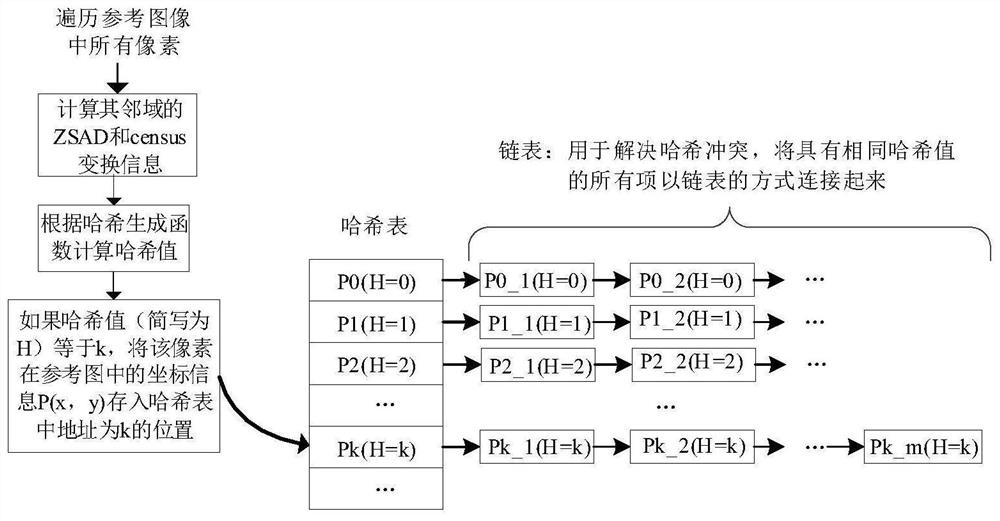
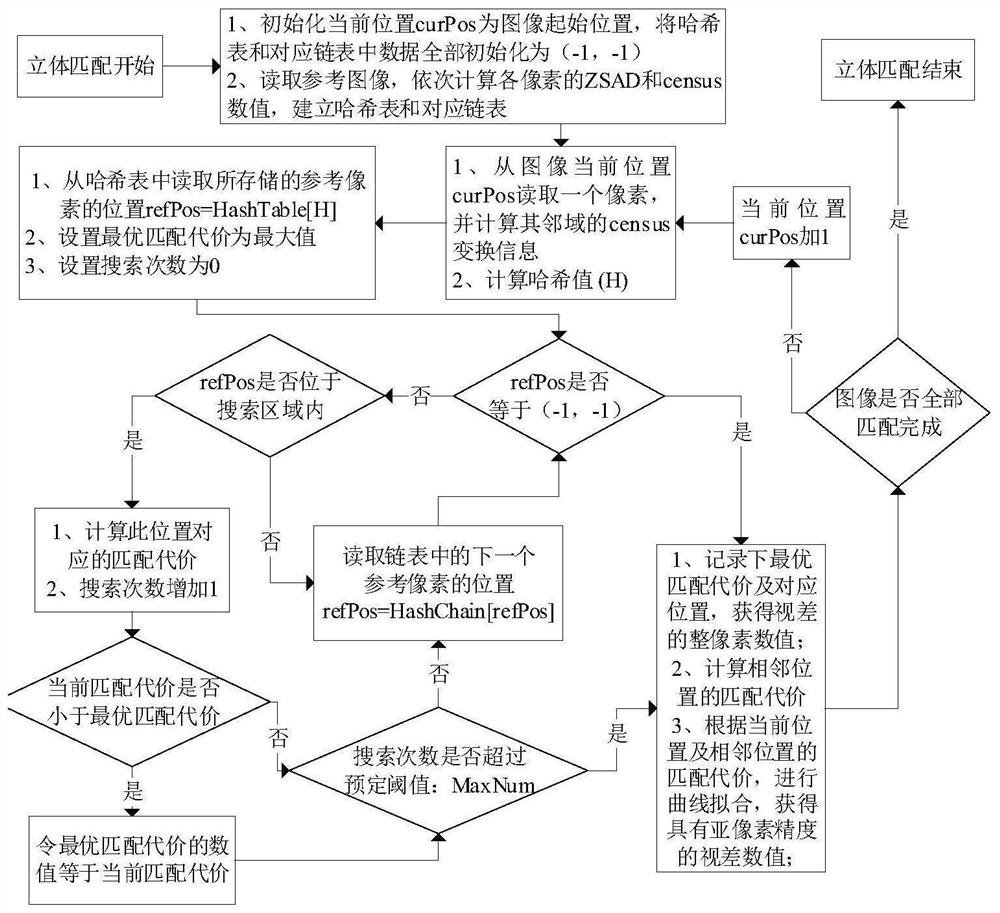
[0073] Such as figure 1 As shown, S1. Before the start of the stereo matching of each frame image, set the Census and grayscale of the stereo matching cost calculation to use the same neighborhood range, the neighborhood window height is 15, the width is 15, and the Census information and ZSAD information are both set Use a window of 5×5, configure the weights in the matching cost calculation formula as λ1=0.65 and λ2=0.35, set the search range of stereo matching as a window of 256×9, and set hash table 1 HTable and hash table 2 The maximum search times of HTable2 are 8 and 32 respectively.
[0074] Such as Figure 1-2 As shown, S2. Input the target image and reference image and traverse each pixel in the image, using N h ×N v Neighborhood gray information, calculate ZSAD information, using M h × M v Neighborhood gray information, calculate Census informa...
Embodiment 2
[0125] The present application also proposes a fast stereo matching method based on ZSAD-Census, including the following steps:
[0126] Such as Figure 1-2 As shown, S1. Before the stereo matching of each frame of image starts, according to the statistical information of the existing frame, configure ZSAD information and Census information to use a 5×5 window to generate, and configure the window of Census data when calculating the matching cost 15×15, configure the window of grayscale data used in the matching cost calculation to be 11×11, configure the weights in the matching cost calculation formula as λ1=0.85 and λ2=0.15, and set the search range for stereo matching to 192×7.
[0127] Such as Figure 1-2 As shown, S2. Input the target image and the reference image and traverse each pixel in the image, use the gray information of the 5×5 neighborhood to calculate the ZSAD information, and use the gray information of the 5×5 neighborhood to calculate the Census information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More