

Nonlinear system fault detection and estimation method and device based on adaptive iterative learning algorithm
A nonlinear system and self-adaptive iterative technology, applied in the field of nonlinear system fault detection and estimation, can solve the problems of large estimation error and slow convergence speed, achieve good accuracy, improve convergence speed, and reduce fault estimation error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
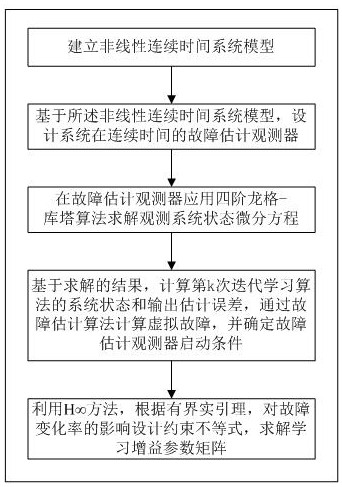
[0025] refer to figure 1 , Embodiment one of the present invention provides a kind of non-linear system fault detection and estimation method based on self-adaptive iterative learning algorithm, described method comprises the following steps:
[0026] Step 1: Establish a nonlinear continuous-time system model.
[0027] The nonlinear continuous-time system model with disturbance is as follows:
[0028]
[0029] where x(t)∈R n is the state of the system, u(t)∈R m is the control input, y(t)∈R p is the output of the system, f(t)∈R q is the fault signal, A, B, C and E are dimension-appropriate matrices, R represents real numbers, n, m, p and q represent dimensions, and g(t,x(t)) represents a continuous nonlinear vector function, assuming here g(t,x(t)) satisfies the Lipschitz condition, and there is a Lipschitz constant L g makes:
[0030] ||g(t,x 2 (t)-g(t,x 1 (t))||≤L g ||x 2 (t)-x 1 (t)||
[0031] The above model is based on the following assumptions:
[0032] A...
Embodiment 2
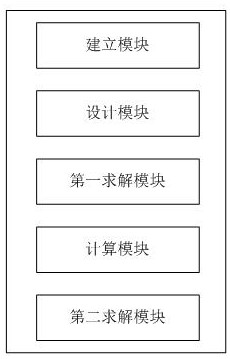
[0144] refer to figure 2 , corresponding to the method in Embodiment 1, Embodiment 2 of the present invention provides a nonlinear system fault detection and estimation device based on an adaptive iterative learning algorithm, the device includes: a building module, a design module, a first solution module, calculation module and second solver module. The various modules are specifically used for:
[0145] The building module is used for building a nonlinear continuous time system model.
[0146] The nonlinear continuous-time system model with disturbance is as follows:
[0147]
[0148] where x(t)∈R n is the state of the system, u(t)∈R m is the control input, y(t)∈R p is the output of the system, f(t)∈R q is the fault signal, A, B, C and E are dimension-appropriate matrices, R represents real numbers, n, m, p and q represent dimensions, and g(t,x(t)) represents a continuous nonlinear vector function, assuming here g(t,x(t)) satisfies the Lipschitz condition, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More