

Charging port pose estimation method and system, charging robot and storage medium
A charging port and pose technology, which is applied in the directions of instrumentation, computing, image data processing, etc., can solve the problem that the charging port without texture features cannot be matched, and achieve the effect of less number of feature points, less amount of calculation, and reduced calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
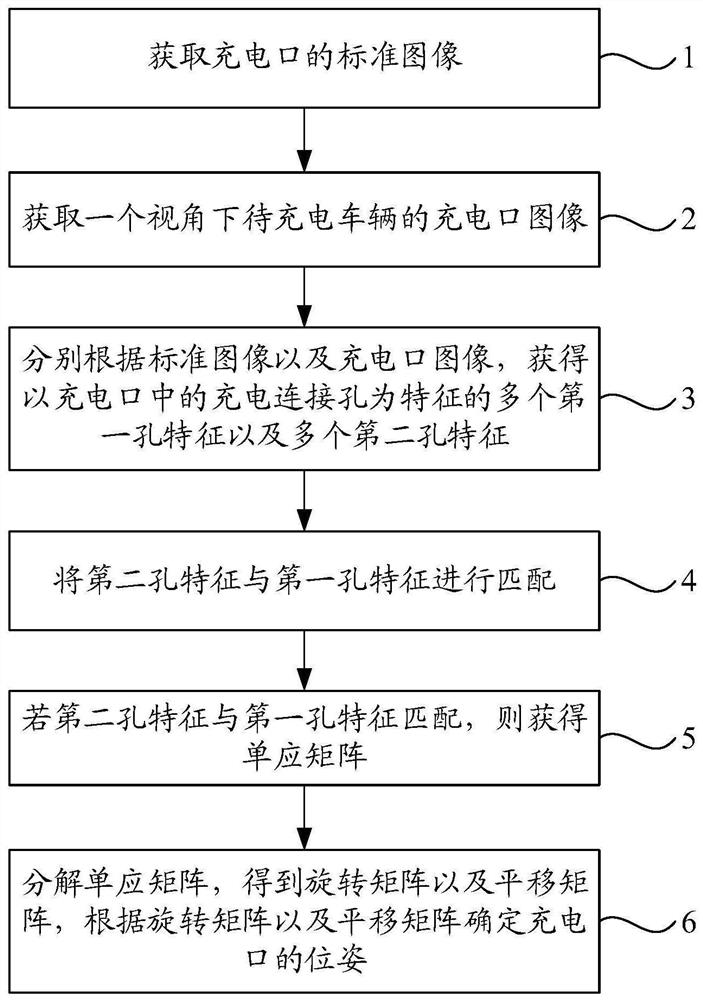
[0037] An embodiment of the present invention provides a charging port pose assessment system including an image acquisition module and a processing module; figure 1 As shown, the charging port pose estimation method provided by the embodiment of the present invention includes:
[0038] Step 1: The processing module obtains the standard image of the charging port. Get Standard Image I aim_crop There are many ways, and this method is not limited.
[0039] For example, standard image I can be drawn through terminals such as computers aim_crop , and then transmitted to the processing module; it is also possible to take a color image directly in front of the charging port of the vehicle through the image acquisition module (such as an RGB camera) as the standard pose image I aim , followed by the standard pose image I aim Manually cut out the standard image I aim_crop . It is also possible to import a standard image I externally aim_crop .
[0040] Step 2: The processing mod...
Embodiment 2
[0146] Such as Figure 4 As shown, the charging port pose estimation method of the present invention can be applied to a charging robot, and the present invention also provides a charging robot, including a mechanical arm 30, an image acquisition module 20 (such as an RGB camera) and a processing module 10, wherein the mechanical The arm 30 is used to carry the charging plug 40 for movement; the image acquisition module 20 is used to acquire the image of the charging port of the vehicle to be charged; the processing module 10 is used to determine the pose of the charging port according to the image of the charging port through the above charging port pose evaluation method ; According to the posture of the charging port, control the movement of the mechanical arm 30 to realize the connection between the charging plug 40 and the charging port. After the charging plug 40 is connected to the charging port, the processing module 10 sends a corresponding instruction, and the energy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More