

Electronic image stabilization algorithm based on vehicle-mounted rearview mirror system
A vehicle-mounted rearview mirror and electronic image stabilization technology, applied in the field of image processing, can solve problems such as video frame sequence jitter, and achieve the effects of short time consumption, high accuracy and accurate parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
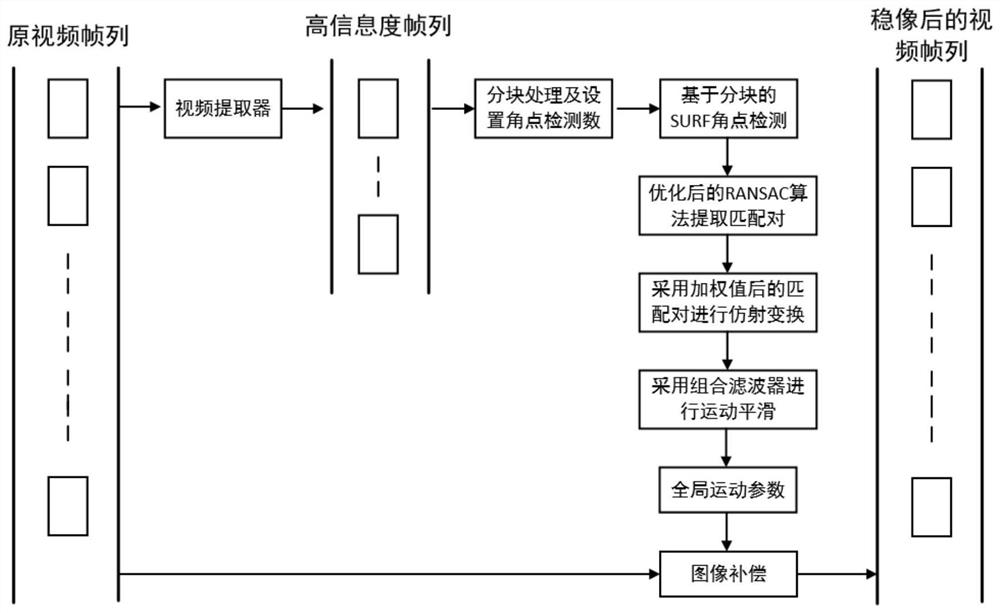
[0083] Specific implementation mode one: the following combination figure 1 , illustrate the specific embodiment of the present invention, concrete steps are as follows:
[0084] (1) Sampling of the original video frame is carried out, and the data volume of the processing video frame is reduced according to the method of variable sampling interval;
[0085] (2) Carry out partition processing on the high-information frame sequence sampled in step (1), which are the body area and the non-body area respectively. The corners of the body area are active motion, and the non-body area is local motion. Set the body area The number of corner points is X, the number of corner points in the non-body area is Y, and then the SURF algorithm is used to detect and track the corner points;
[0086] (3) Use the optimized RANSAC algorithm to eliminate the mismatching of the feature points extracted in step (2). The feature points of the body area and non-body area after elimination are U, V, and...
specific Embodiment approach 2
[0091] Specific implementation mode two: the following combination figure 2 , illustrate the specific embodiment of the present invention, described step (1), because the video sequence frame that obtains is more and mostly similar, then adopt the method for variable sampling distance to carry out the video sequence frame that sampling process obtains little change, described preprocessing It is to perform Gaussian filtering on the extracted video frame sequence to suppress noise, wherein Gaussian filtering uses a two-dimensional zero-mean discrete Gaussian function as a smoothing filter, namely:
[0092]
[0093] In the formula, G(x, y) is a Gaussian function, μ is a mathematical expectation, σ 2 is the standard deviation, and (x, y) is the coordinates of the pixel.
specific Embodiment approach 3
[0094] Specific embodiment three: present embodiment is to further illustrate specific embodiment one, and in step (2), described SURF algorithm is used for extracting and tracking feature point, basic steps are as follows:
[0095] (1) Construct the Hessian matrix
[0096] The core of SURF is the Hessian matrix. The Hessian matrix H is composed of functions and partial derivatives. Each pixel can find a Hessian matrix for feature extraction, namely:
[0097]
[0098] In the formula, (x, y) is the coordinate of the pixel, f(x, y) represents the coordinate relationship of the pixel, Indicates taking two derivatives of x, Indicates to take the derivative of x and then take the derivative of y, Indicates taking two derivatives with respect to y.
[0099] The discriminant of the Hessian matrix is as follows:
[0100]
[0101] Among them, H represents a matrix, and x and y are pixel coordinates.
[0102] The value of the discriminant is the eigenvalue of the H matri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More