

Flexible cable traction double-upper-limb collaborative movement rehabilitation robot
A rehabilitation robot and cable traction technology, applied in the field of rehabilitation robots, can solve the problems of complex structure, poor flexibility, and inability to achieve coordinated movement rehabilitation training of both upper limbs, and achieve the effects of good flexibility, good coordination, and high rehabilitation efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below with reference to the accompanying drawings:
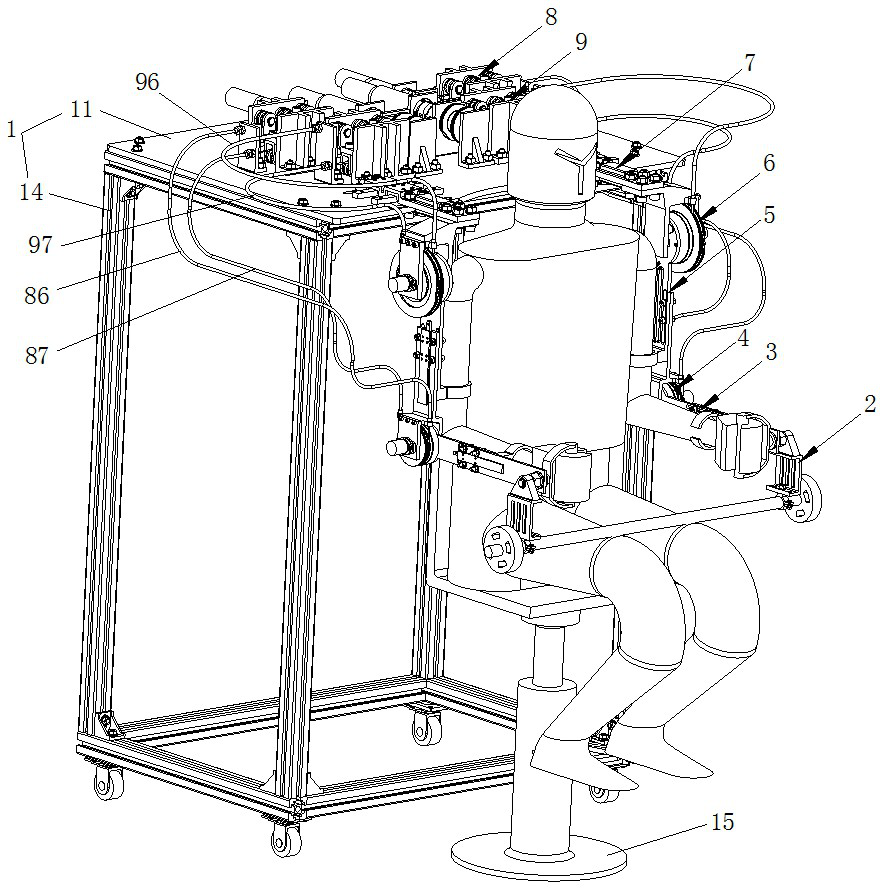
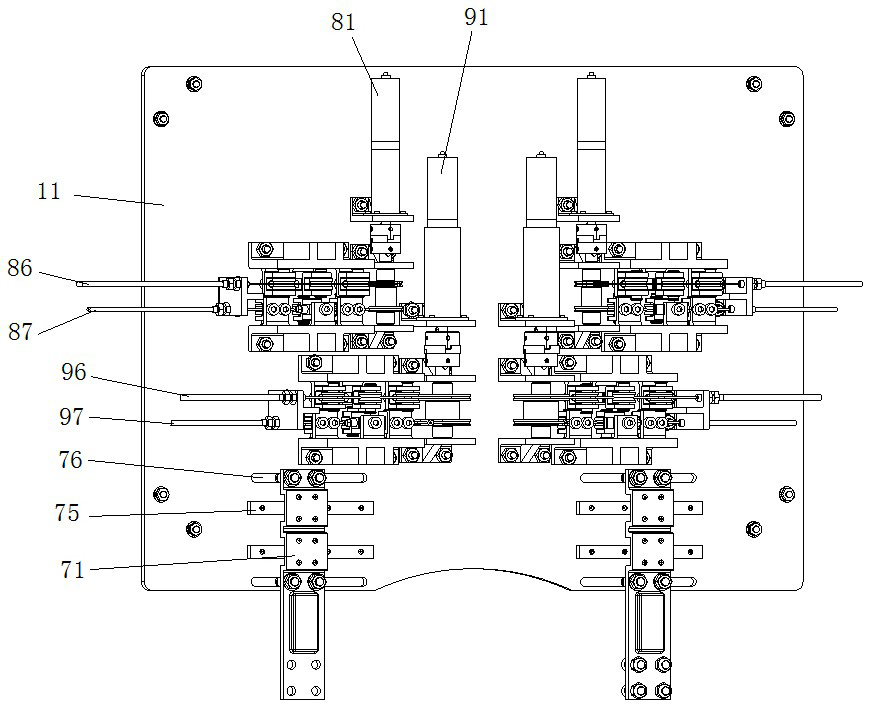
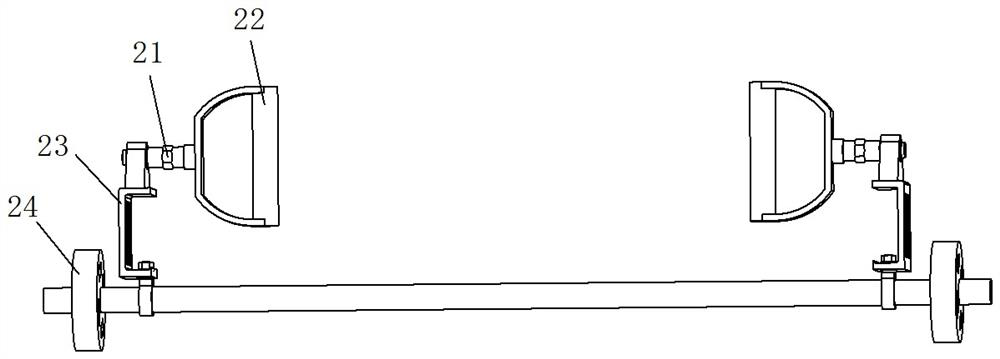
[0044] like figure 1 , figure 2 Flexible traction cable the one shown in the upper limbs of the robot coordinated motion rehabilitation, comprising a structure provided with the same and symmetrically arranged assembly of left upper limb and the right upper limb rehabilitation rehabilitation unit, the left and right upper limb rehabilitation rehabilitation unit 1 on the rack, the rack 1 arm assembly means each include means connected to the hand 2, the hand means 23, by means of the upper arm and forearm connected to means 5 3 4 elbow, shoulder joint through the shoulder means 6 connected to the arm mechanism 57, the elbow 4 forearm joint power transmission mechanism 8 is connected to the drive means 3 is operated arm, shoulder and upper arm 6 is connected to the power transmission mechanism 9 to drive the arm mechanism 5 is operated, arm mechanism 3 is provided between the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More