

Unmanned aerial vehicle flight control system parameter optimization method based on particle swarm optimization algorithm
A technology of particle swarm algorithm and flight control system, which is applied in the field of automatic control to achieve the effect of performance improvement, comprehensive performance improvement and low input energy loss
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044]The technical solutions provided by the present invention will be described in detail below in conjunction with specific examples. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
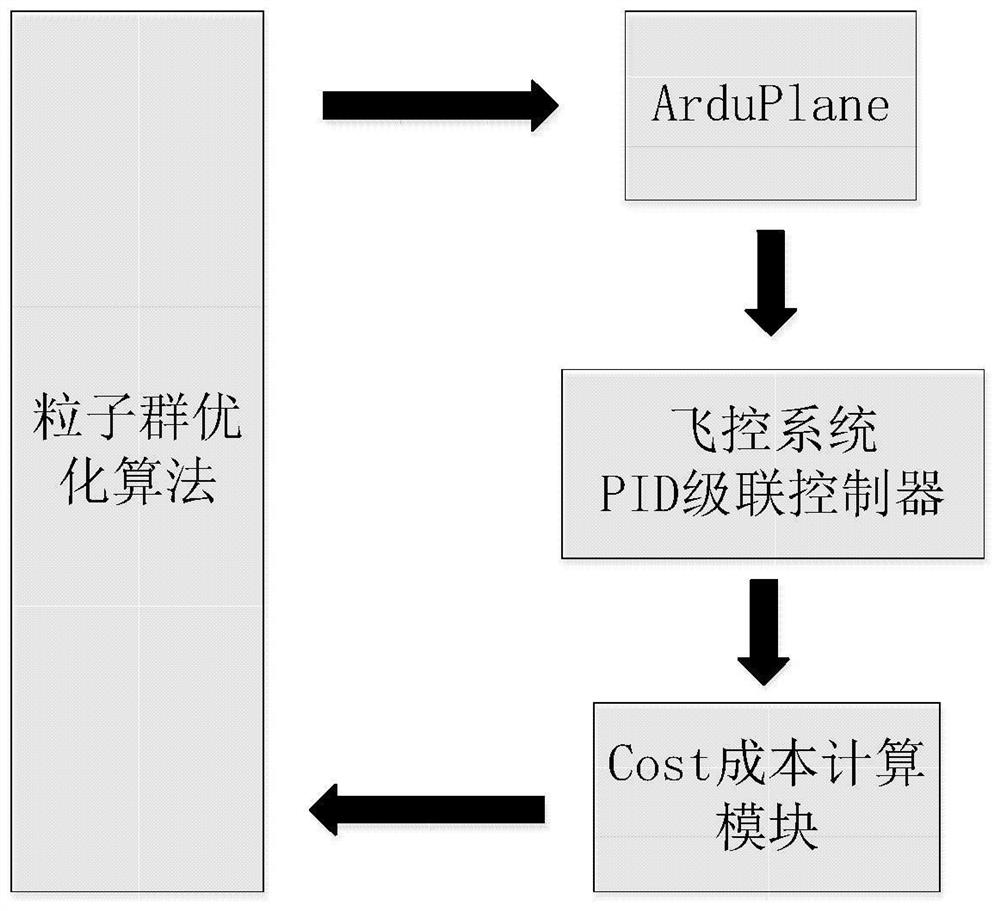
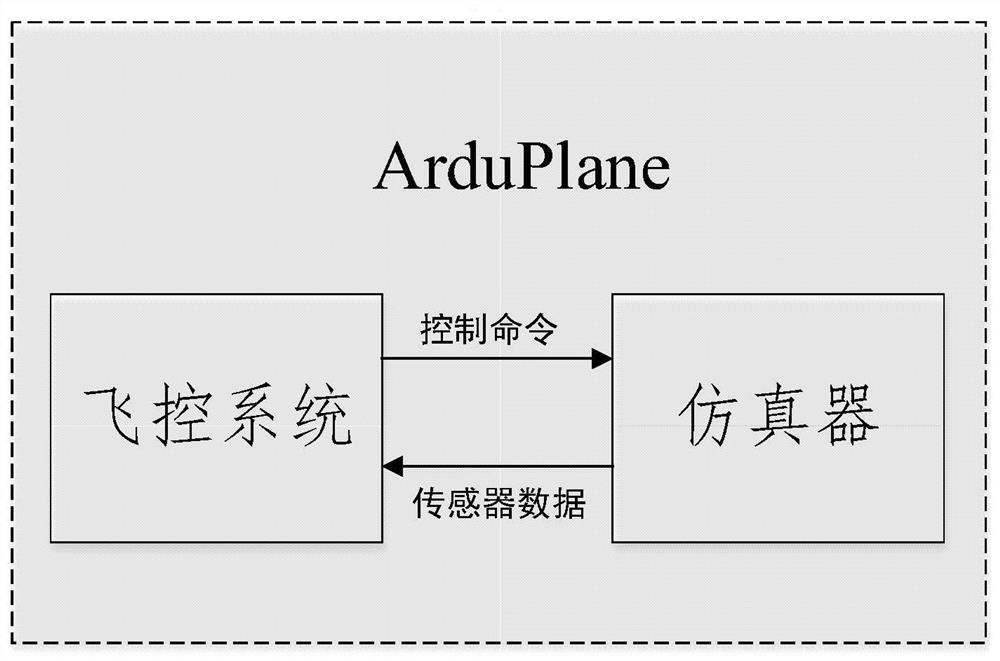
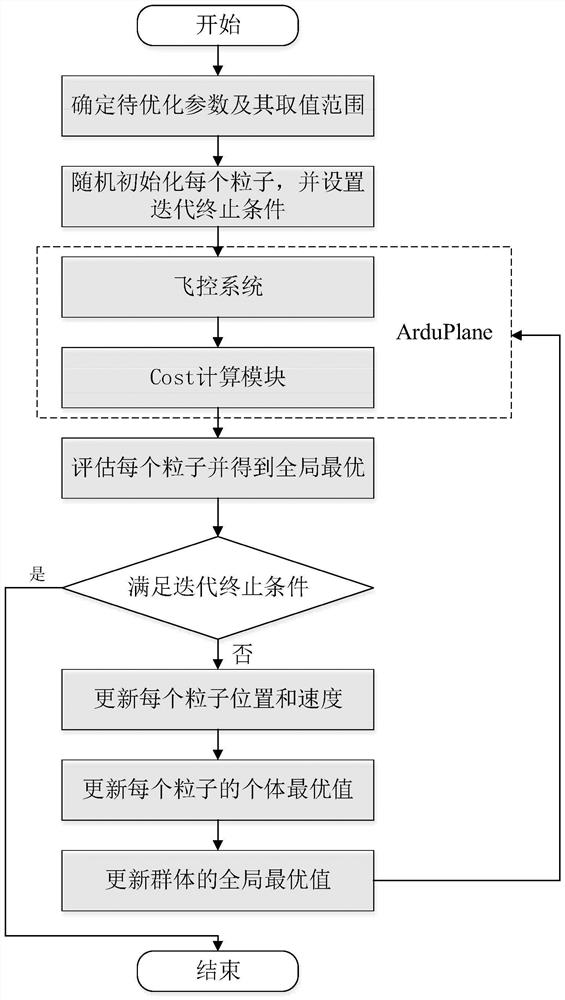
[0045] The overall frame flow of the method of the present invention is as figure 1 As shown, first, the particle swarm algorithm calculates and updates the speed and direction of each particle swarm movement in the particle swarm based on the cost value fed back by the cost calculation module, and obtains a new set of parameter values to be optimized, and then the ArduPalne flight control system Start the software-in-the-loop (SITL) simulator according to the newly obtained controller parameter value, the flight control system sends the flight attitude controller input data to the simulator, and the simulator returns the sensor data of the flight control system,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More