

AR holographic surgical navigation system coordinate system conversion method, device thereof and system
A technology of coordinate system conversion and surgical navigation, which is applied in the field of coordinate system conversion of AR holographic surgical navigation system, can solve problems such as unsuitable coordinate systems for surgical navigation terminals and AR display equipment, and achieve the effect of shortening calibration time and reducing coordinate errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
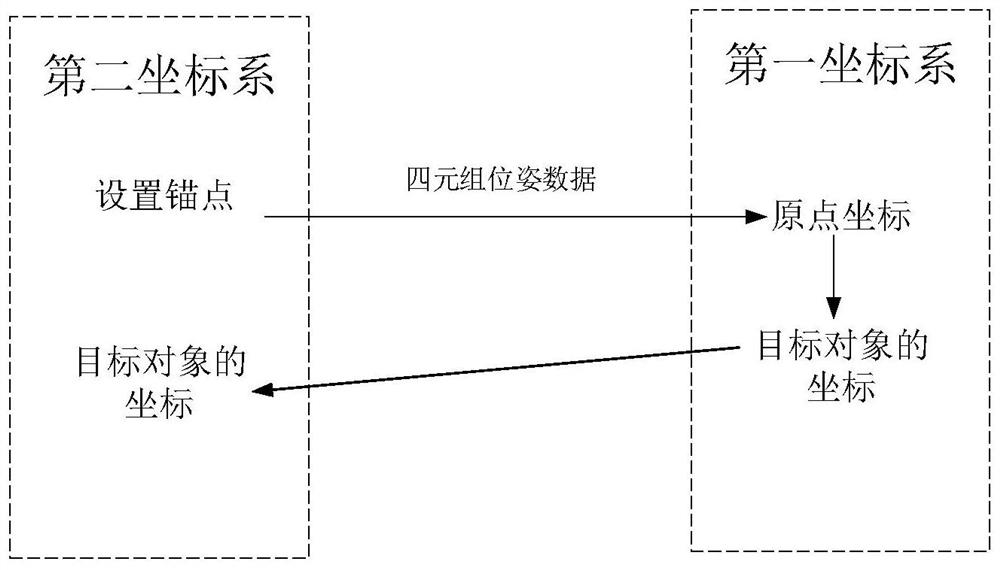
[0029] Embodiment 1 is a coordinate system conversion method of an AR holographic surgery navigation system, such as figure 1 As shown, the anchor point is set in the second coordinate system, and the position of the anchor point in the second coordinate system is used as the origin of the first coordinate system; the pose of the anchor point in the second coordinate system is converted to the first In the coordinate system, obtain the anchor point quadruple pose data of the anchor point in the first coordinate system; obtain the first pose data of the target object in the first coordinate system, combine the anchor point quadruple pose data to the first Coordinate system transformation is performed on the pose data to obtain second pose data of the target object in the second coordinate system; wherein, the first pose data and the second pose data include three-dimensional coordinates and / or rotation matrices. In Embodiment 1, an anchor point is set in the second coordinate s...
Embodiment 2
[0037] Present embodiment 2 is on the basis of embodiment 1, as figure 2 As shown, an AR holographic surgery navigation system coordinate system conversion device includes:
[0038] The first coordinate module: used to receive the pose of the anchor point in the second coordinate system in the second coordinate module, and obtain the anchor point quadruple pose data of the anchor point in the first coordinate system; used to obtain the first coordinate The first pose data of the target object in the second coordinate system is combined with the anchor quadruple pose data to perform coordinate system conversion on the first pose data to obtain the second pose data of the target object in the second coordinate system, and the second The two-bit pose data is sent to the second coordinate module;
[0039] The second coordinate module: used to set the anchor point, and use the position of the anchor point in the second coordinate system as the origin of the first coordinate syste...
Embodiment 3
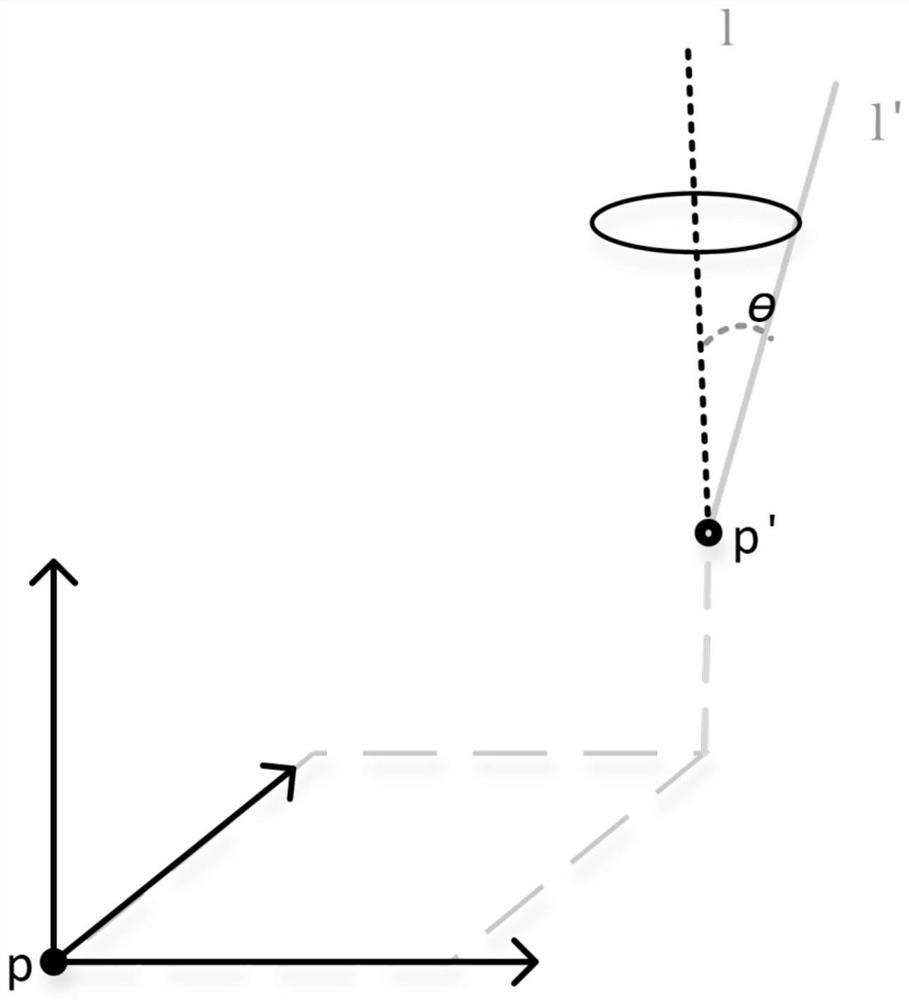
[0044] The third embodiment is based on the first embodiment. A new coordinate conversion and calibration method, comprising the following steps:
[0045] HoloLens is developed using unity. When the main camera coordinates are set to (0, 0, 0) in unity development, HoloLens will establish a left-handed world coordinate system based on the current position of HoloLens in the real world when starting the project, so the focus is on navigation. The problem of aligning the pose data information in the right-handed coordinate system of HoloLens in the left-handed coordinate system. However, since it is impossible to determine a specific position of the HoloLens device as the coordinate origin of the coordinate system, in Example 3, an anchor point is installed on the HoloLens device and this anchor point is used as the origin of the HoloLens coordinate system, but the metal anchor point is The right-handed coordinate system, therefore, involves two coordinate system conversion met...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More