

Exoskeleton wearable upper limb rehabilitation training mechanism
A rehabilitation training and wearable technology, applied in the field of rehabilitation robots, to achieve the effect of changing the rigidity of the system, high flexibility of movement, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
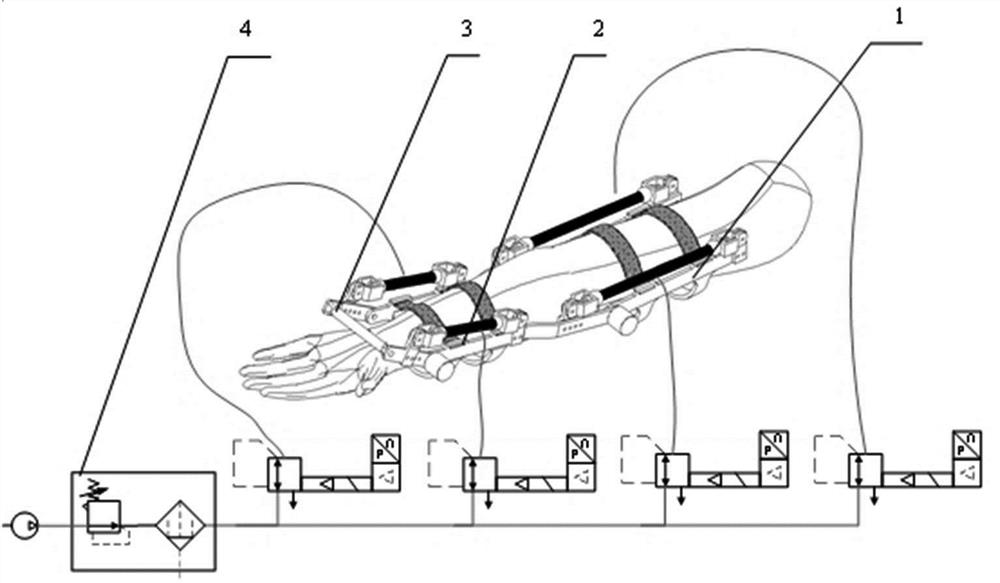
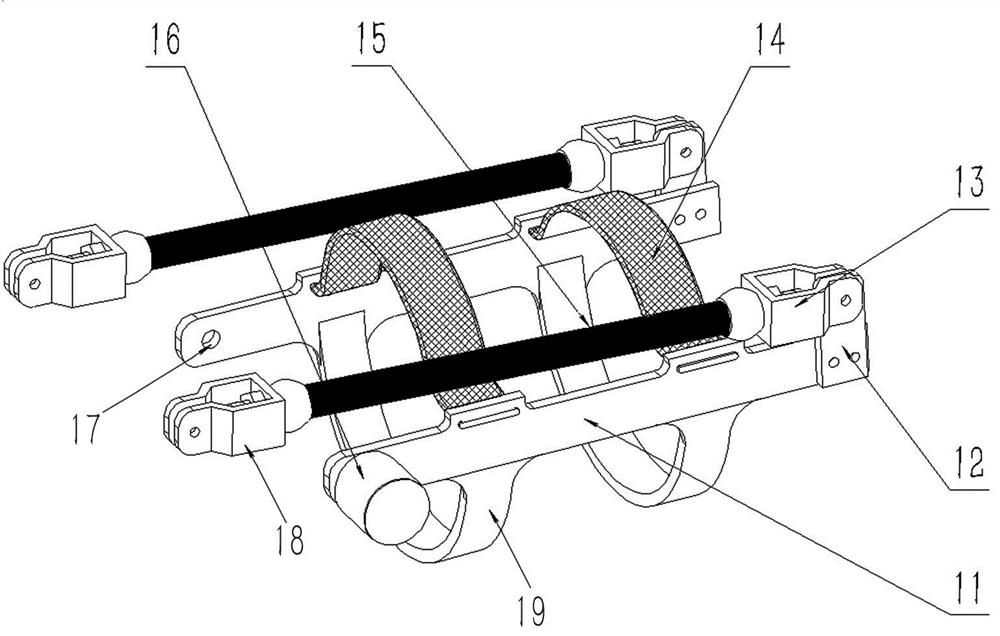
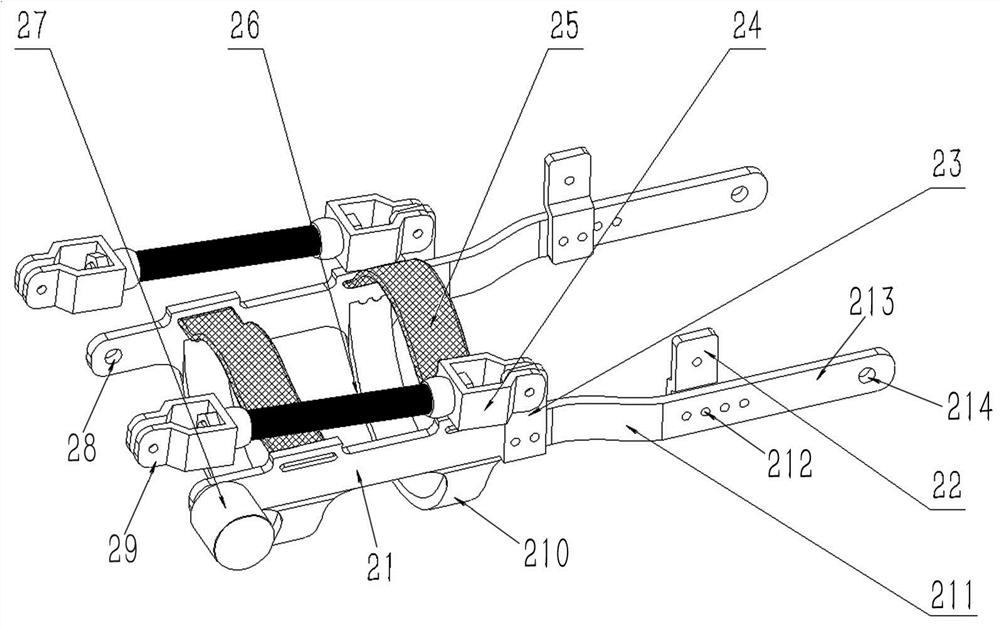
[0035] Outer skeleton wearable upper limb rehabilitation training institution, its structure Figure 1 - Figure 5 As shown, including the larger arm moving assembly 1, the arm moving assembly 2, and the wrist joint moving assembly 3; the large arm moving assembly 1 and the arm moving assembly 2 are provided with a pneumatic artificial muscle assembly, and the pneumatic artificial muscle assembly is connected. The air supply assembly 4; between the large arm moving assembly 1 and the crane moving assembly 2, a rotary connection assembly is provided between the ambient moving assembly 2 and the wrist joint moving assembly 3, and the pneumatic artificial muscle assembly drives the rotary connection assembly. Pneumatic artificial muscle assembly includes a large arm pneumatic artificial muscle group disposed on the large arm moving assembly 1, a firk pneumatic artificial muscle group disposed on the firing assembly 2; the rotary connection assembly includes cooperation with the large a...
Embodiment 2
[0047] One kind of wearable exoskeleton upper limb rehabilitation training mechanism, as in Example 1 except that: the curved inner surface 19 of the boom is laid webs are flexible cushion, the cushion is laid non-slip flexible cushion.
Embodiment 3
[0049] One kind of wearable exoskeleton upper limb rehabilitation training mechanism, as in Example 1 except that: the inner surface of the arc arm connecting plate 210 are laid a flexible mat, non-slip cushion is laid within the flexible cushion.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More