

Mechanical arm autonomous moving grabbing method based on visual-tactile fusion under complex illumination condition
A technology of lighting conditions and autonomous movement, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of inability to obtain the precise three-dimensional spatial position of the target object, prevent the instability of the fuselage, and improve the positioning accuracy and grasping of objects. The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
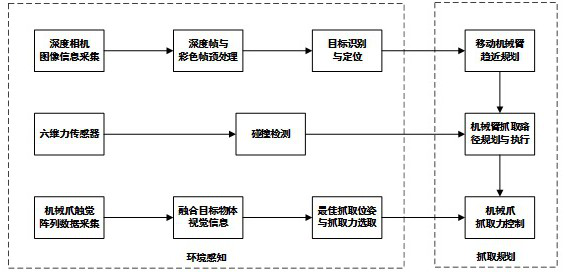
[0070] Embodiments of the present invention provide a visual-touch fusion-based robotic arm autonomous moving and grasping method under complex lighting conditions. The overall system block diagram is as follows figure 1 shown, including:
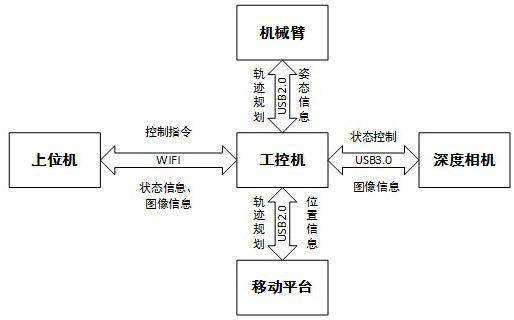
[0071] The communication module is used to control the transmission of instructions, images and pose information, including the upper computer system installed on the remote console and the industrial computer system installed on the mobile platform. The two systems are connected through WiFi and use the SSH communication protocol. The upper computer sends control instructions to the industrial computer, and the industrial computer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More