Virtual-real fusion unmanned cluster collaborative verification system
A technology of collaborative verification and virtual-real fusion, applied in the field of unmanned cluster collaborative verification system, to achieve the effect of node cutting, task expansion, and function plug-and-play
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
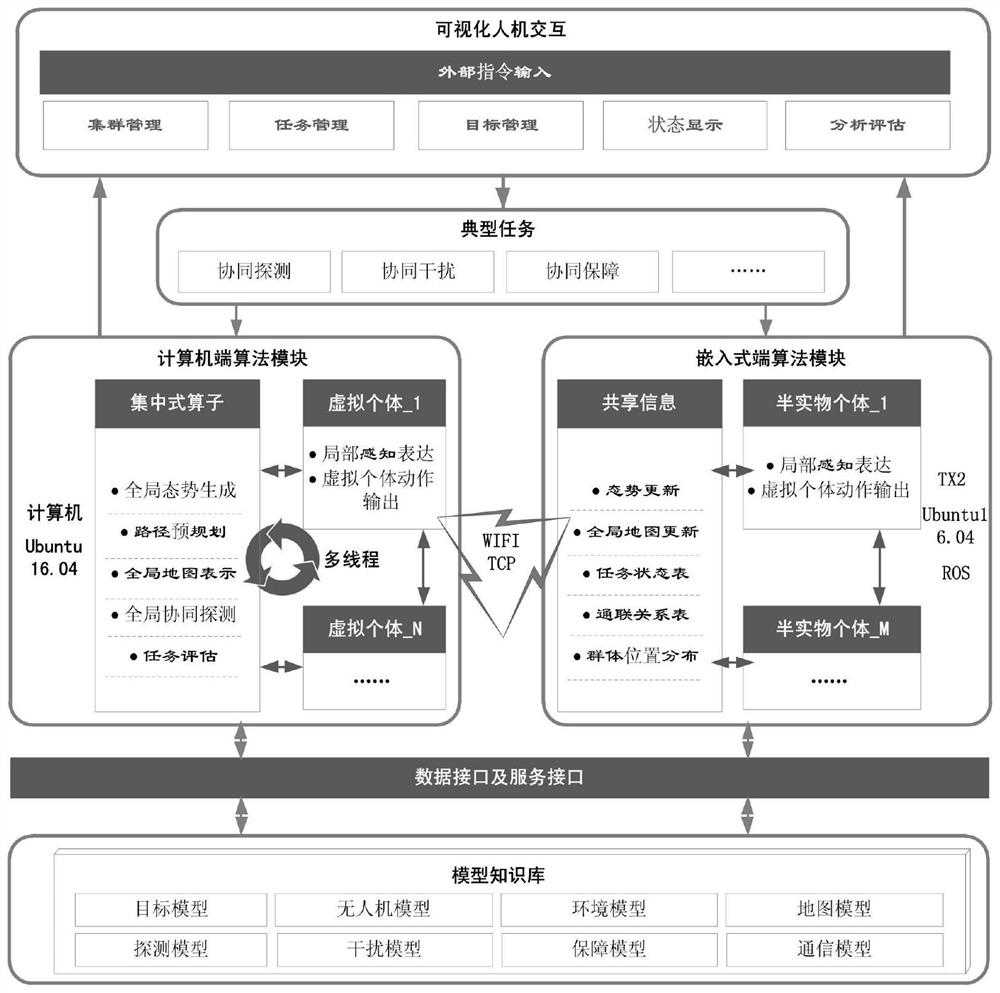
[0020] The specific implementation steps of the present invention will be described in detail below in conjunction with the technical scheme and accompanying drawings, and the design principle of the whole technical scheme is as follows: figure 1 shown.
[0021] 1. The unmanned swarm collaborative verification system to be constructed is divided into a virtual part and a semi-physical part. The virtual part needs to be deployed on a general-purpose computer, and the semi-physical part needs to be deployed on an airborne embedded system.
[0022] Among them, the general-purpose computer uses a portable workstation with the Ubuntu 16.04 operating system as the operating environment of the virtual part; the embedded onboard system uses Nvidia Jetson TX2 with the same Ubuntu 16.04 operating system as the operating environment of the semi-physical part.
[0023] 2. Construct a basic hardware environment with a computer and M airborne embedded systems as the core, and the data inter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More