

Deep reinforcement learning training acceleration method for collision avoidance of multiple unmanned aerial vehicles
A technology of reinforcement learning and collision avoidance, applied in the field of drones, can solve the problems of tediousness, low degree of automation, and low degree of automation, and achieve the effect of accelerating the training process, good control strategy, and simple principle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
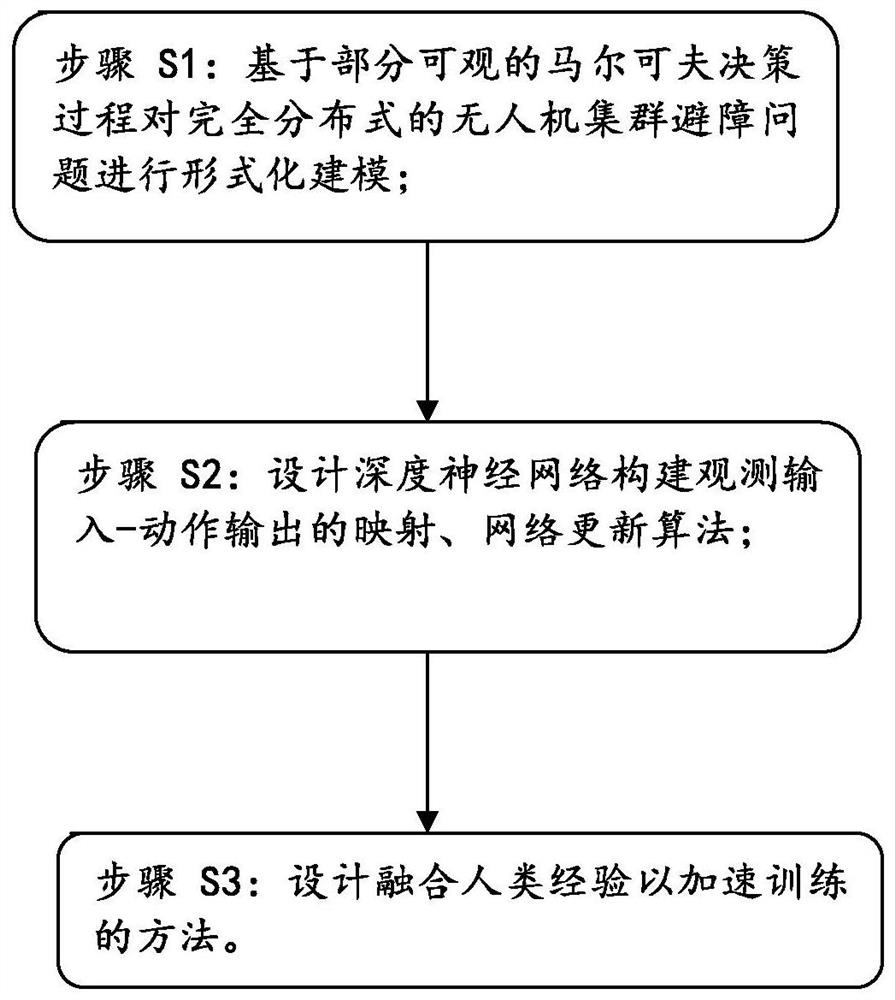
[0050] Such as figure 1 with figure 2 As shown, the deep reinforcement learning training acceleration method for multi-UAV collision avoidance of the present invention is a deep reinforcement learning method based on human experience assistance, which includes:
[0051]Step S1: Formally model the fully distributed UAV swarm obstacle avoidance problem based on a partially observable Markov decision process;
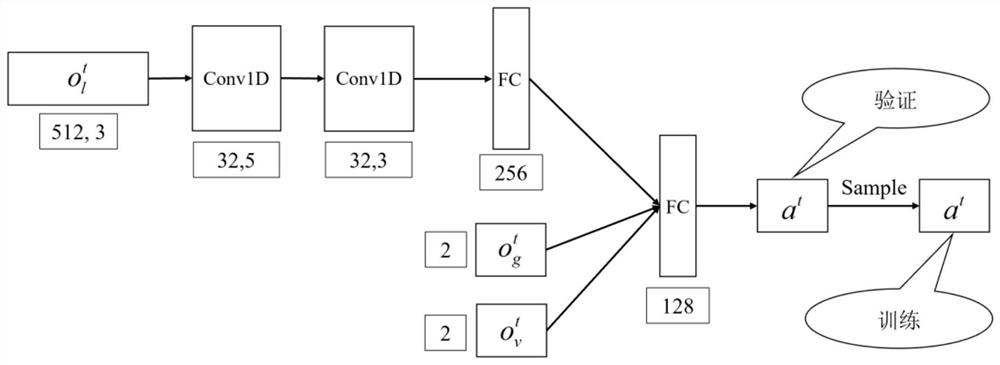
[0052] Step S2: Design a deep neural network to construct a mapping of observation input-action output and a network update algorithm;
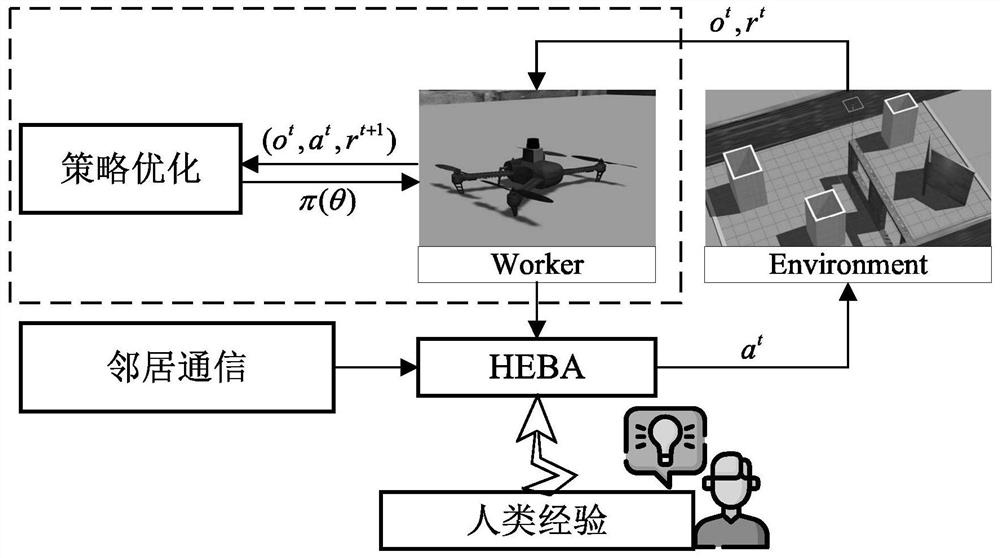
[0053] Step S3: Design methods to incorporate human experience to accelerate training.
[0054] In a specific application example, in step S1, the formal modeling process includes:
[0055] The problem of cooperative obstacle avoidance in the process of multi-UAV going to the target location...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More