

Proportional guidance method and artificial potential field method combined path planning method suitable for dynamic target tracking
An artificial potential field method and proportional guidance technology, which is applied in the direction of motor vehicles, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems of not considering the need for obstacle avoidance and low tracking efficiency, and achieve high engineering Effect of application value, improvement of tracking efficiency, and improvement of security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
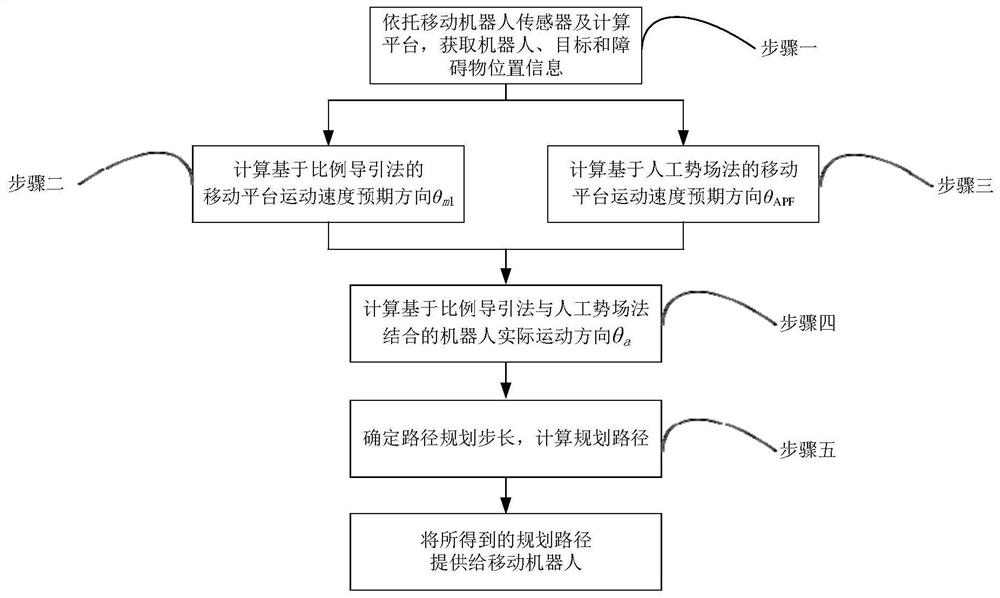
[0072] Step 1: Obtain the location information of the target to be tracked, determine the starting point and end point of the path planning of the mobile robot and initialize it;
[0073] The mobile robot establishes a plane coordinate system and obtains the position information of the target and itself and the position information of obstacles in the plane with high precision in real time through the equipped computing unit, visual camera, laser radar and other sensors;
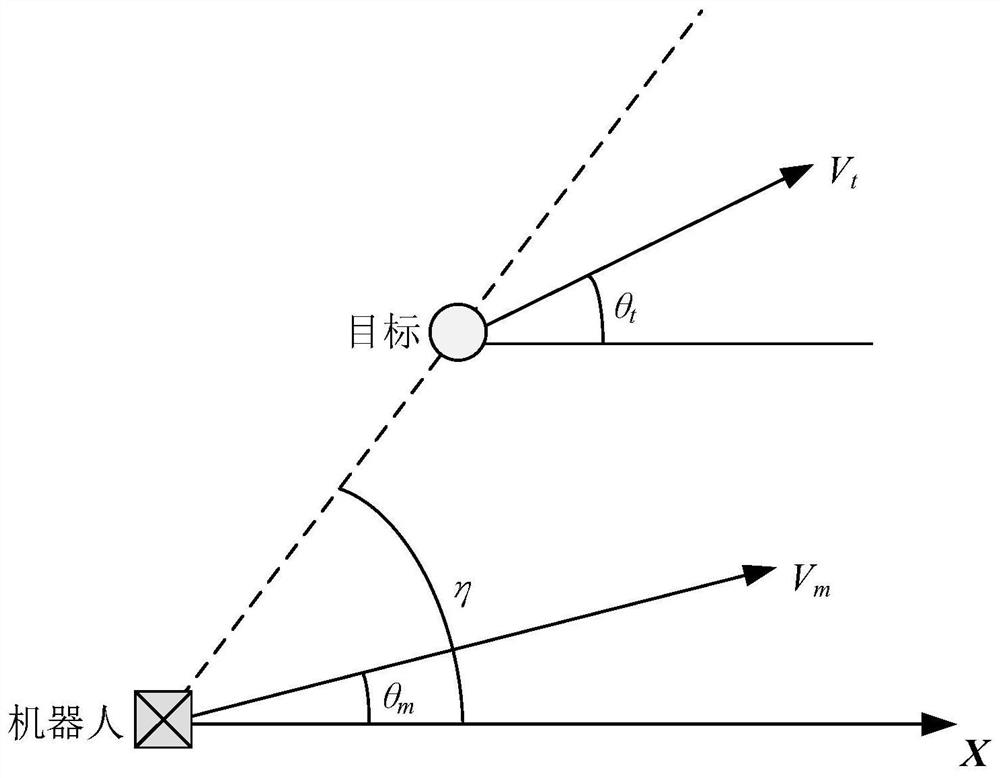
[0074] Step 2: Calculate the expected movement direction of the robot based on the proportional guidance method according to the robot's own position and target position information at the current moment and the previous moment:
[0075] Let the target position acquired by the robot at the current moment be (x t1 ,y t1 ), the target position at the last moment is (x t0 ,y t0 ), the robot position at the current moment is (x 1 ,y 1 ), the position of the robot at the last moment is (x 0 ,y 0 ). Then a...
specific Embodiment approach 2
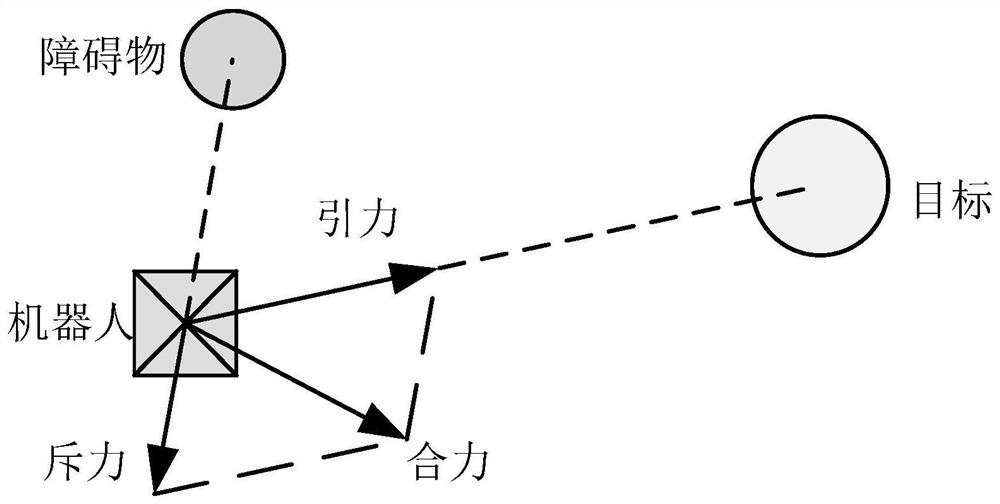
[0116] This embodiment is a numerical example description of a path planning method that combines the proportional guidance method and the artificial potential field method suitable for dynamic target tracking. For the tracking task of the mobile robot to the target, the design simulation example and algorithm parameters are as follows: Among them, the obstacle position is a number of obstacle points randomly selected in the 100×100 map, the initial coordinate of the target is (0, 80), and the acceleration is 0.2m / s -2 Perform uniformly accelerated linear motion along the positive direction of the x-axis, the initial coordinates of the robot are (0, 0); the proportional guidance coefficient is K c =6; artificial potential field gravitational gain coefficient K a =1, repulsion gain coefficient K r =15, the range of repulsive force p 0 =2m, to overcome the target unreachable adjustment coefficient n * = 3; select step size l a = 0.5m. When the distance between the robot a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More