

Indoor positioning method of inspection robot
An inspection robot and indoor positioning technology, applied in the field of inspection robots, can solve the problems of unclear camera, easy accumulation of dust and dirt on the camera, and inconvenient search
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Next, the technical solutions in the embodiments of the present invention will be described in connection with the drawings of the embodiments of the present invention, and it is understood that the described embodiments are merely the embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art are in the range of the present invention without making creative labor premise.
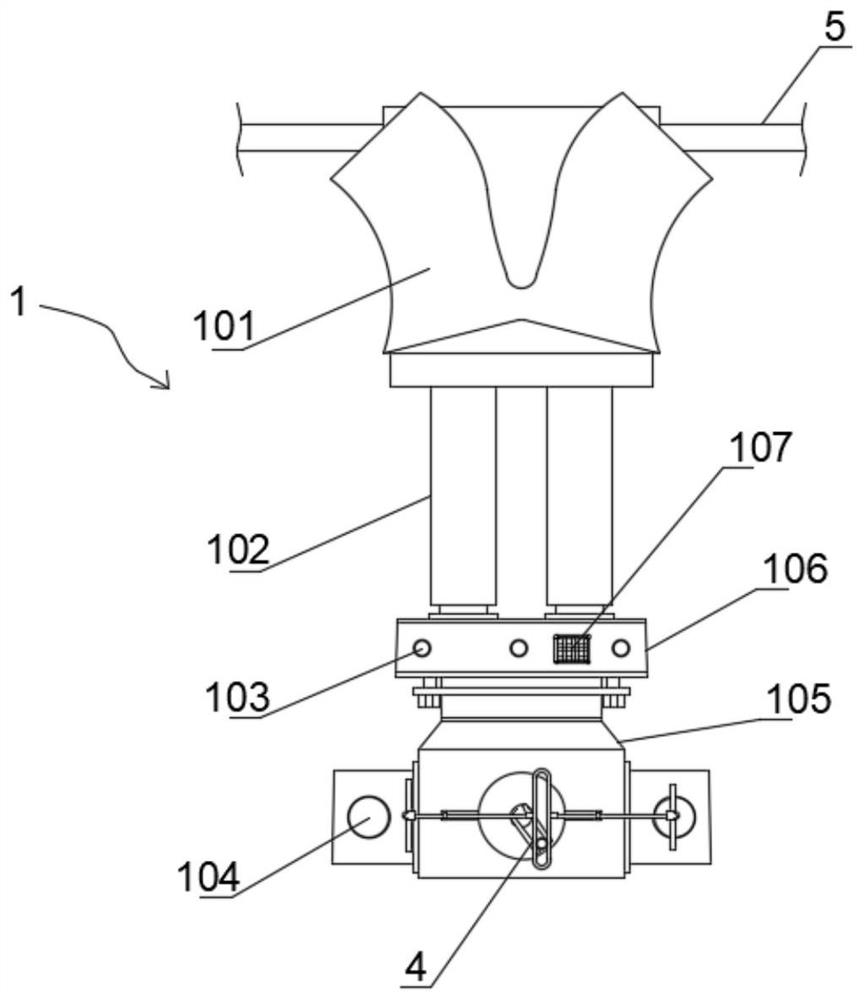
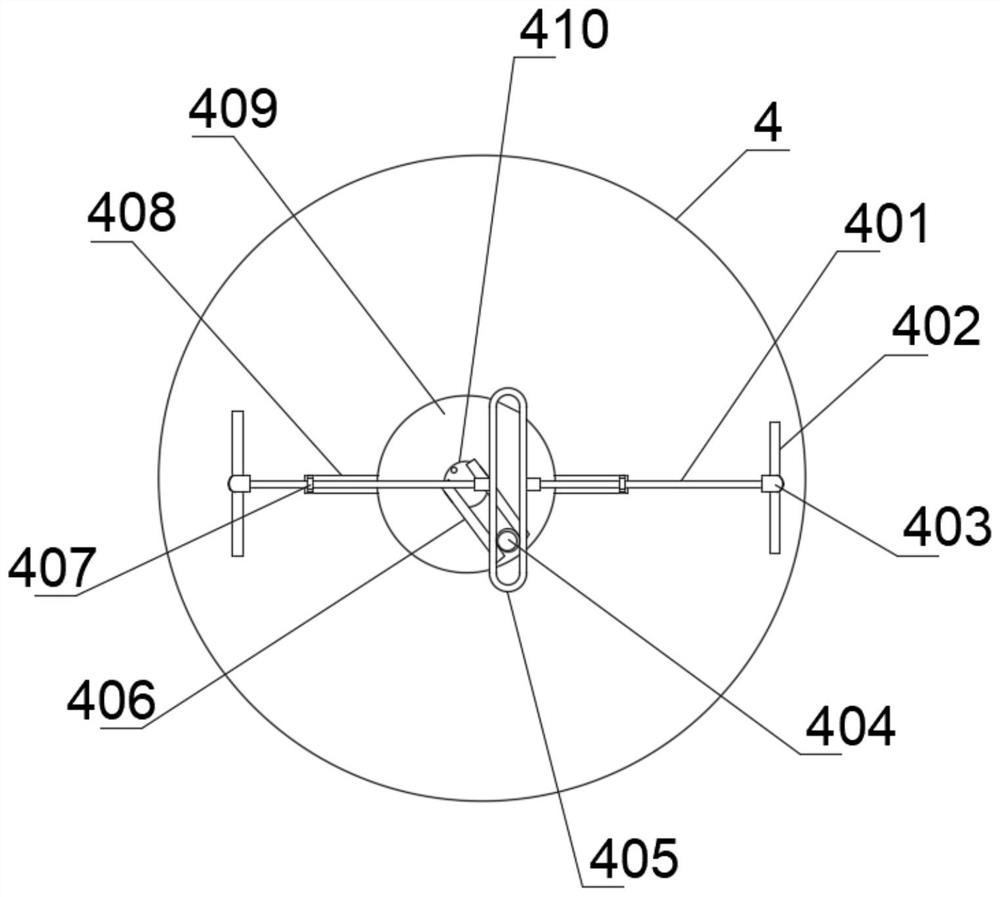
[0028] See Figure 1-5 The present invention provides a technical solution: A method for indoor location of inspection robot, comprising the steps of:
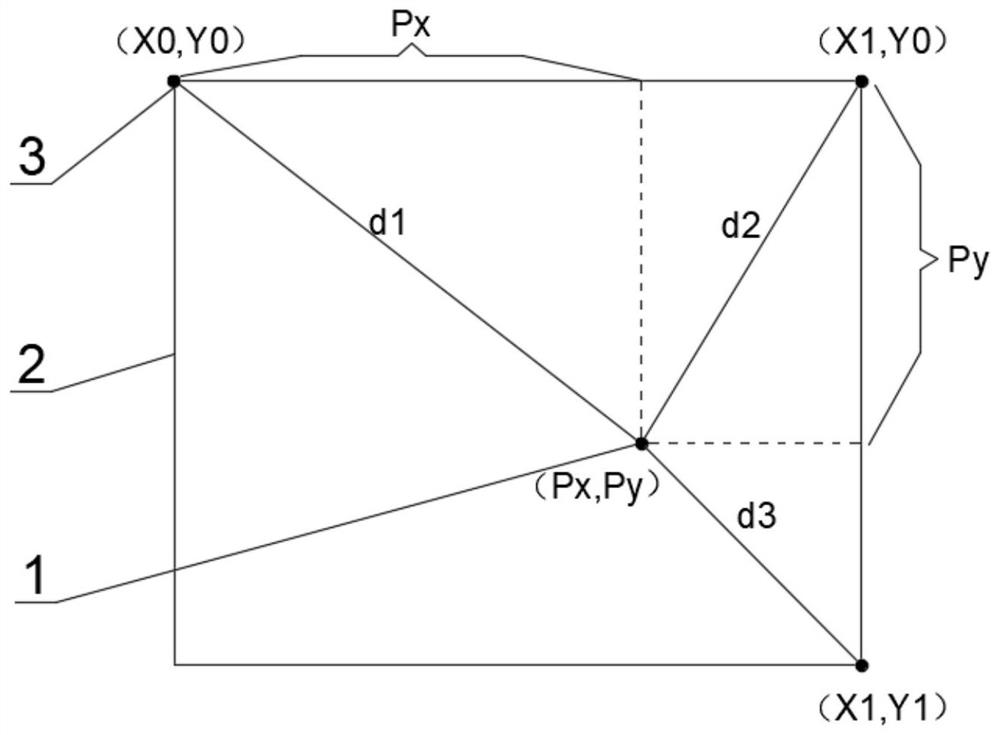
[0029] Step a: iBeacon three modules 3 are disposed inside the triangle of the machine room 2, and three iBeacon positioning module 3 are set to (x0, y0), (x1, y0) and (x1, y1);
[0030] Step two: 2 disposed inside the engine room intelligent inspection robot 1, a signal detected by three intelligent module 3 iBeacon inspection r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More