

Fruit posture adjustable picking robot end effector and harvesting method
An end effector and picking robot technology, applied in the field of agricultural robots, can solve the problems of complex control process and slow picking speed, and achieve the effects of simple control process, fast adjustment speed and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
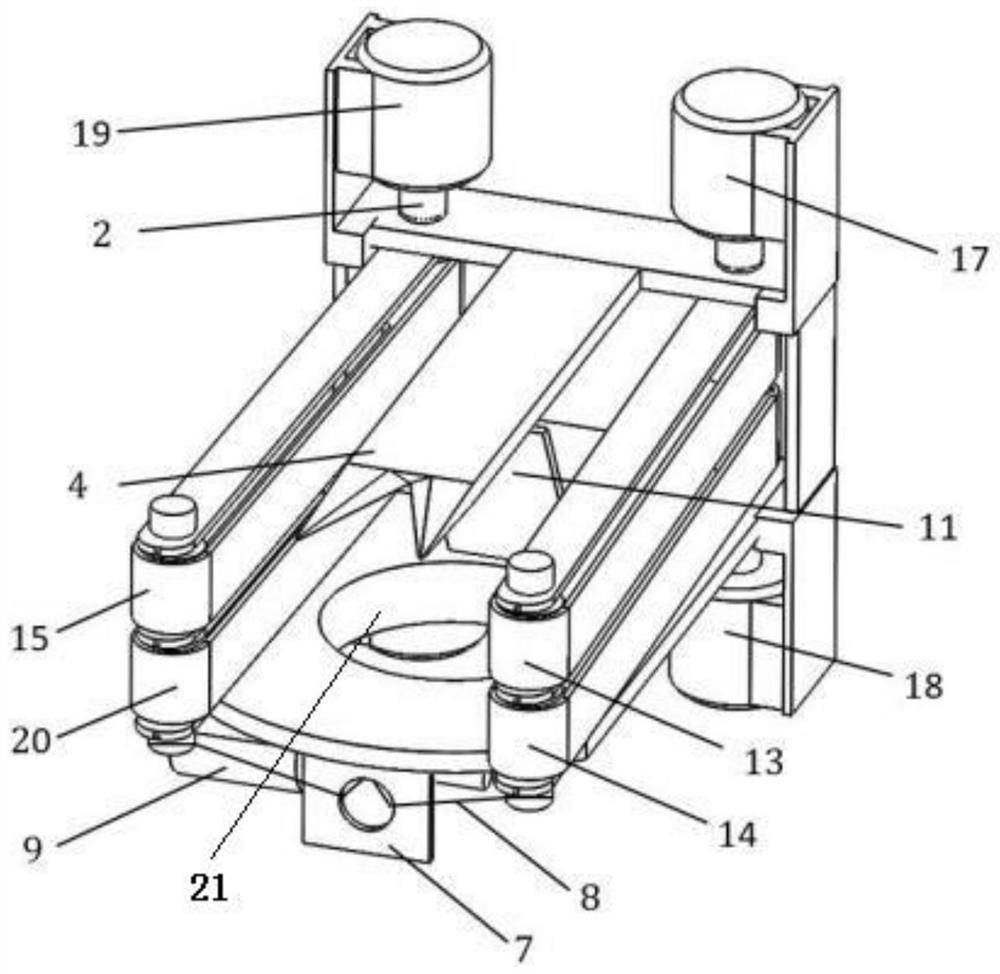
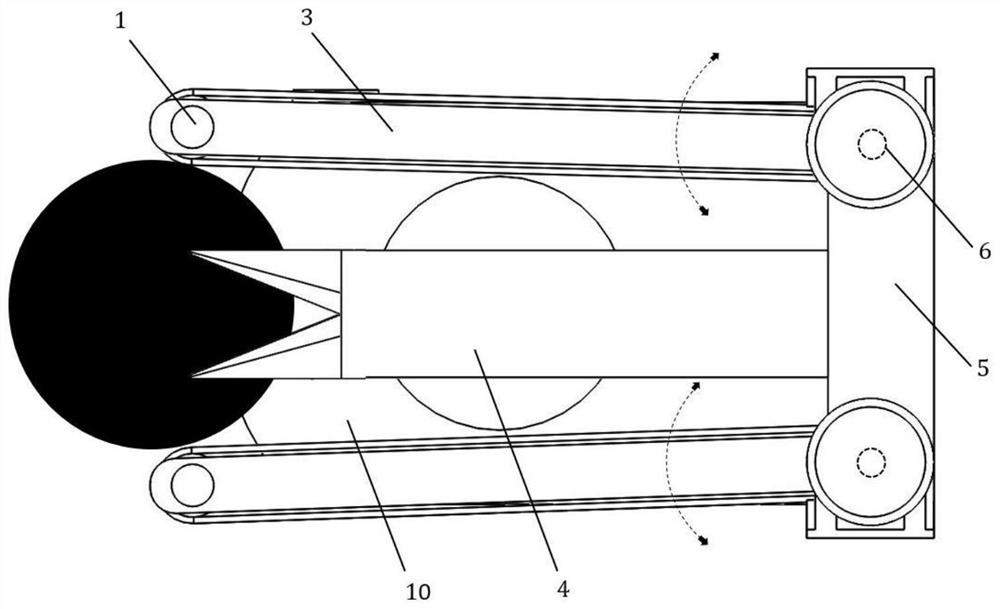
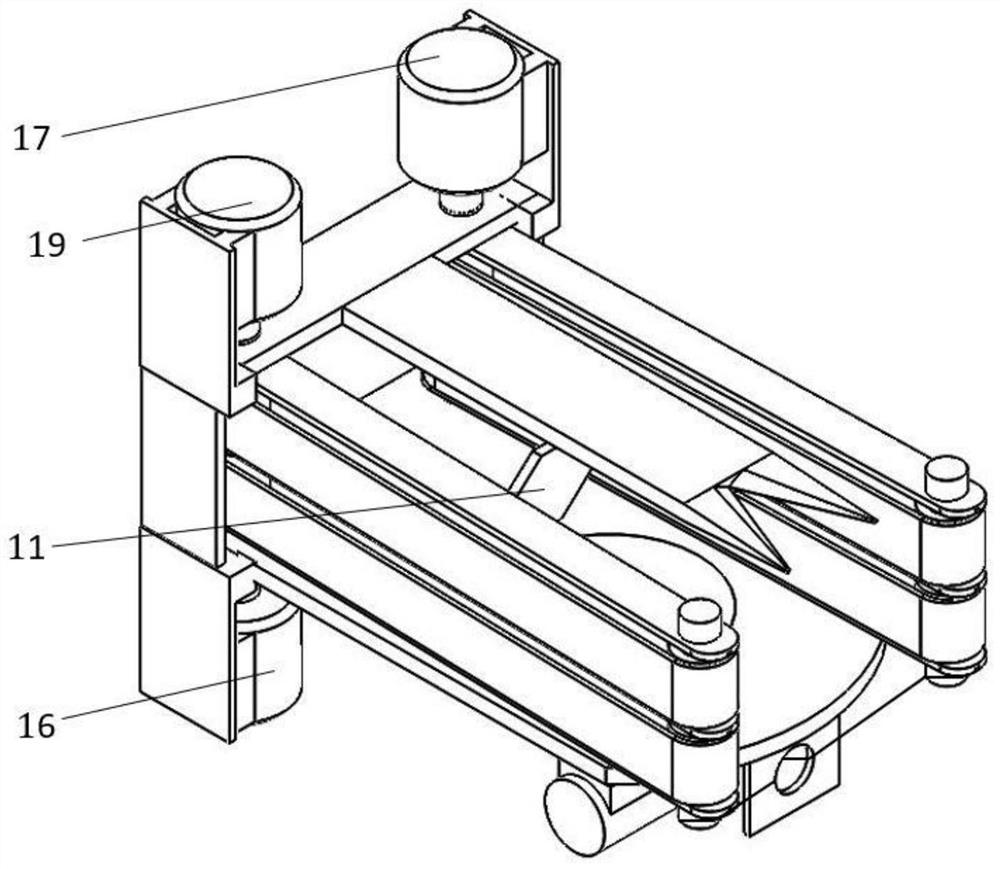
[0037] Example 1, such as Figure 1 to Figure 4 As shown, the fruit picking robot end effector with adjustable fruit posture includes a frame 5 and a pulley fixing mechanism. A pulley fixing mechanism is fixed at both ends of the frame 5, and two pulley fixing mechanisms are respectively fixed at both ends of the pulley fixing mechanism. A fruit clamping wheel 1 and two driving wheels 2, each fruit clamping wheel 1 and driving wheels 2 cover a clamping belt.
[0038] The pulley fixing mechanism includes two pulley floating plates 3 positioned on the upper and lower layers of the fruit clamping wheel 1 and the driving wheel 2, and the wheel shaft of the fruit clamping wheel 1 and the wheel shaft of the driving wheel 2 are fixed by two pulley floating plates 3 .
[0039] The axis of the fruit-clamping wheel 1 is fixed on the pulley floating plate 3 and can freely rotate around the axis.
[0040] The driving wheel 2 is responsible for driving the clamping belts, and the fruit c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More