Multi-unmanned aerial vehicle autonomous navigation and task allocation algorithm for wireless self-powered communication network
A task allocation algorithm and communication network technology, applied in the field of multi-UAV autonomous navigation and task allocation algorithm, can solve the problem that the communication range is limited, the position of ground sensor equipment is not considered unknown, and a single UAV cannot always cover the entire area and other issues to achieve the effect of realizing energy supply, maximizing the average data volume, and ensuring fairness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The invention is further illustrated in conjunction with the accompanying drawings and examples.
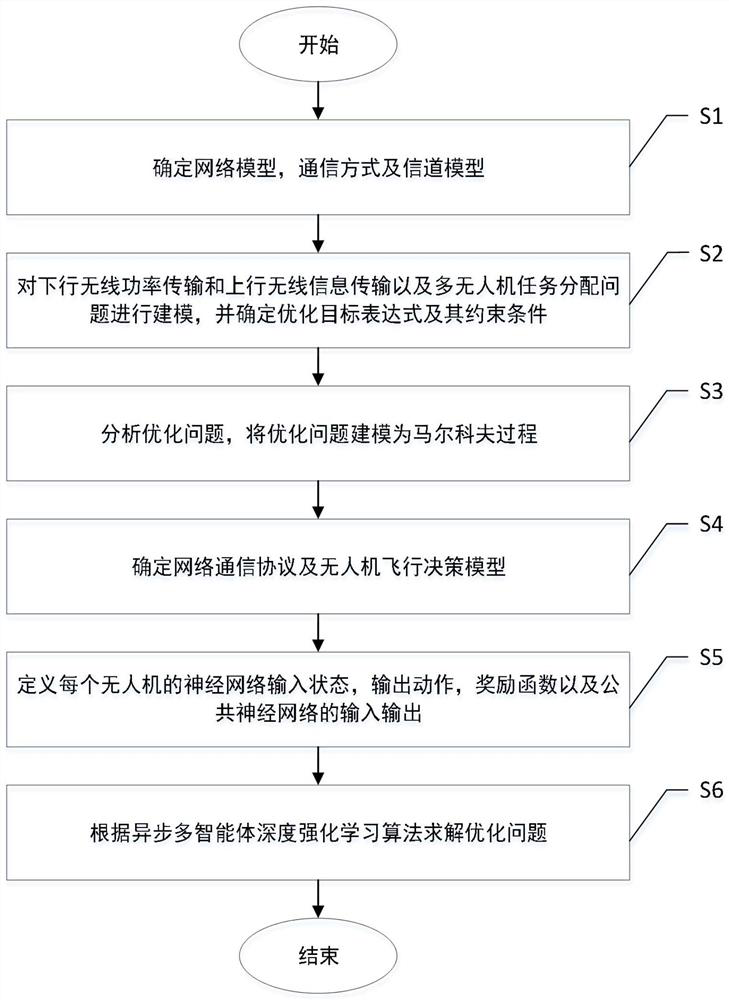
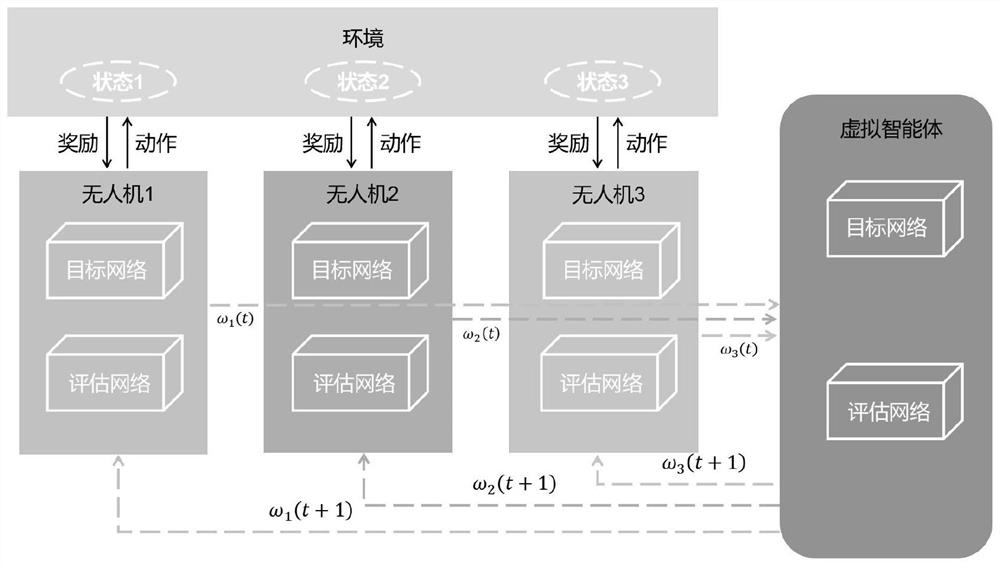
[0046] Refer Figure 1 to 3 , A multi-drone autonomous navigation and task assignment algorithm for wireless self-powered communication networks, including the following steps:
[0047] Step S1, determine the network model, communication mode, and channel model.
[0048] This step specifically includes the following steps:
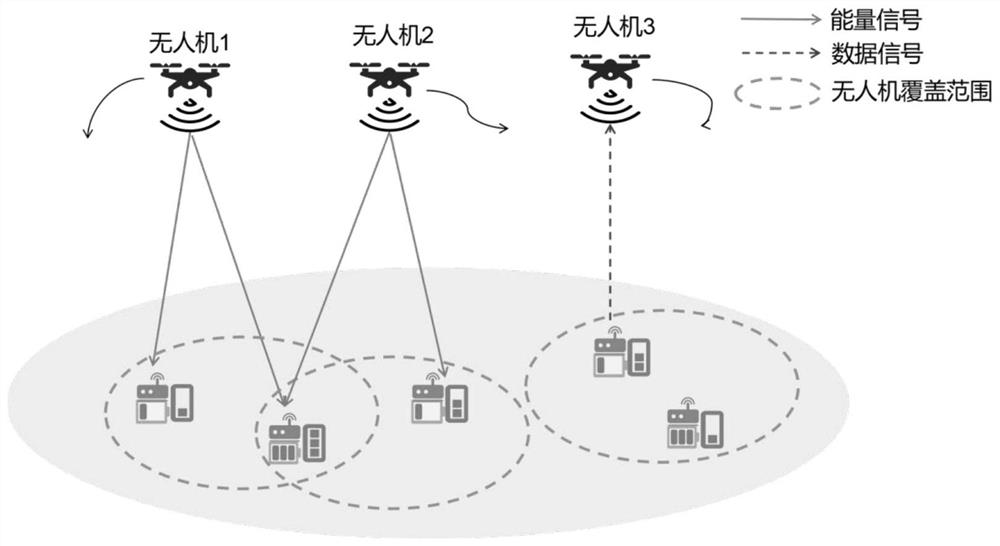
[0049] Step S11, determine the network model.
[0050] Suppose there is a U. The ground has K sensor equipment, the coordinates of the kth sensor device is In order to simplify the network model, it is assumed that the flying height of the drone is constant, fixed to H. Among them, the coordinates of the two-dimensional plane of the U. Flight speed is V u (t), the carrier signal transmit power of the U frame drone is fixed to P UAV , Channel noise power is σ 2 . At T, the distance between the US U.manship and the kth sensor device is Among them || · || r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com