

Equipment-free personnel action recognition and position estimation method based on multi-task learning
A multi-task learning and action recognition technology, applied in the field of action recognition and position estimation of personnel without equipment, can solve the problems of increasing positioning errors, and achieve the effects of improving estimation performance, improving practicability and convenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Objects, advantages and features of the present invention will be illustrated and explained by the following non-limiting description of preferred embodiments. These embodiments are only typical examples of applying the technical solutions of the present invention, and all technical solutions formed by adopting equivalent replacements or equivalent transformations fall within the protection scope of the present invention.
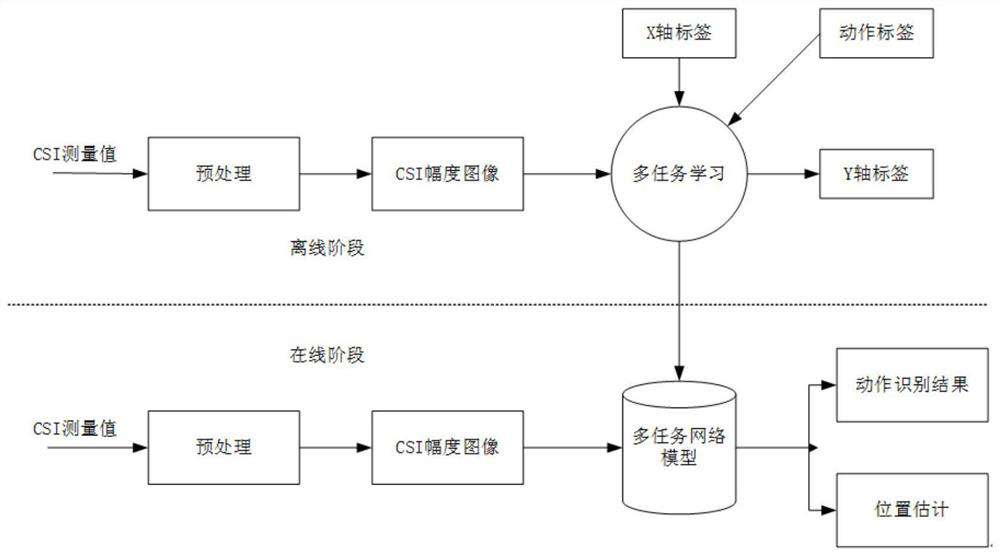
[0041] The present invention discloses a method for action recognition and position estimation of personnel without equipment based on multi-task learning. Aiming at the defects existing in the prior art, a method for action recognition and position estimation of personnel without equipment based on multi-task learning is proposed. Not only the positioning accuracy and action recognition rate are high, but also the structure is simple and the implementation cost is low.
[0042] A non-device human action recognition and position estimation method bas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More