

Telescopic sleeve arm type unmanned aerial vehicle air-based recovery docking control method based on LADRC
A control method and telescopic sleeve technology, which are applied in control/regulation systems, program-controlled manipulators, non-electric variable control, etc., can solve the problems of the docking point being close to the recovery platform, high docking risk, and poor aerial stability, so as to improve efficiency. and reliability, improving accuracy and anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
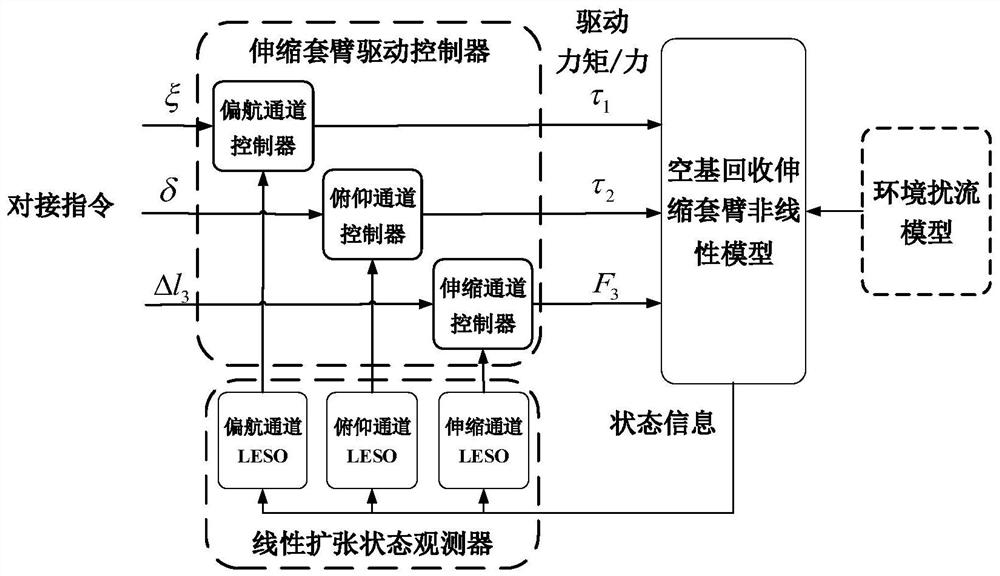
[0040] The invention discloses a LADRC-based control method for space-based recovery and docking of a telescopic sleeve type unmanned aerial vehicle. First, a nonlinear model of the telescopic sleeve is established and affine nonlinear processing is performed on it; further, the environment of the telescopic sleeve is comprehensively considered In order to accurately reconstruct the unmeasurable lumped disturbances in the system, the extended state observer is designed to accurately reconstruct the influence of disturbances and unmeasurable ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More