Somatosensory operation glove with force feedback effect
A force feedback and somatosensory technology, which is applied in the direction of manipulators, manufacturing tools, and data processing input/output processes, can solve problems such as poor presence, and achieve the effects of simple structure, enhanced presence, and easy wearing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to better understand the technical solution of the present invention, the following will be described in detail through specific examples:
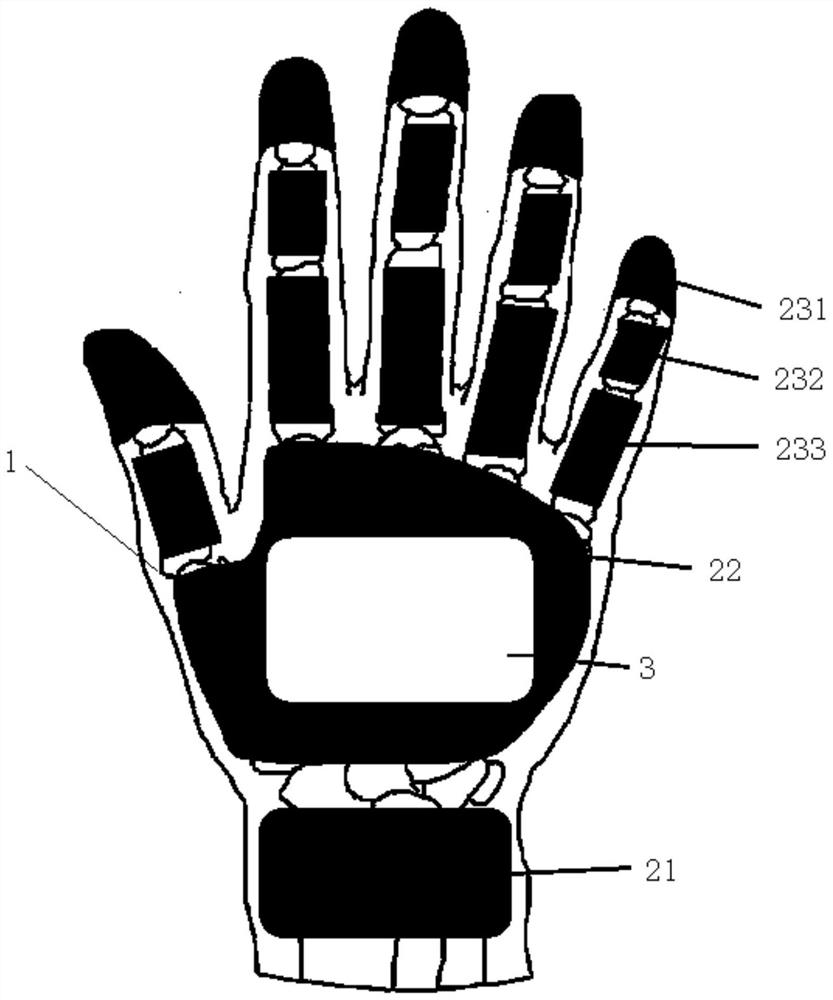
[0020] see figure 1 , a somatosensory work glove with force feedback effect of the present invention includes a base body 1, a base frame, a drive motor, a sensor and a microcontroller lower computer 3.
[0021] The base body is a double-layer glove structure worn on the hand, which is made of double-layer elastic material and wraps the entire hand and the front end of the forearm. The sensor and its connection circuit are arranged in the interlayer of the double-layer glove structure of the base body, wrapped between two layers of materials, and the base frame, driving motor and microcontroller lower computer 3 are located on the surface of the base body 1. The glove-like base is fixed by the friction between the inner fabric and the hand, and is attached with a fixed bandage made of elastic material, which can be furthe...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap